登录社区云,与社区用户共同成长
邀请您加入社区
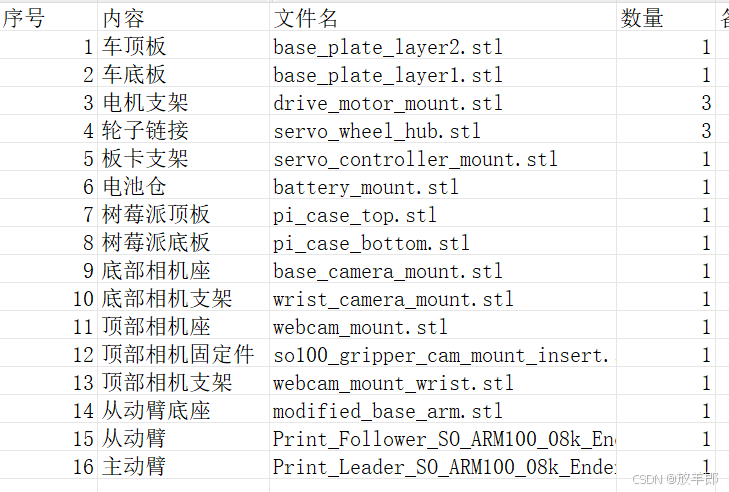
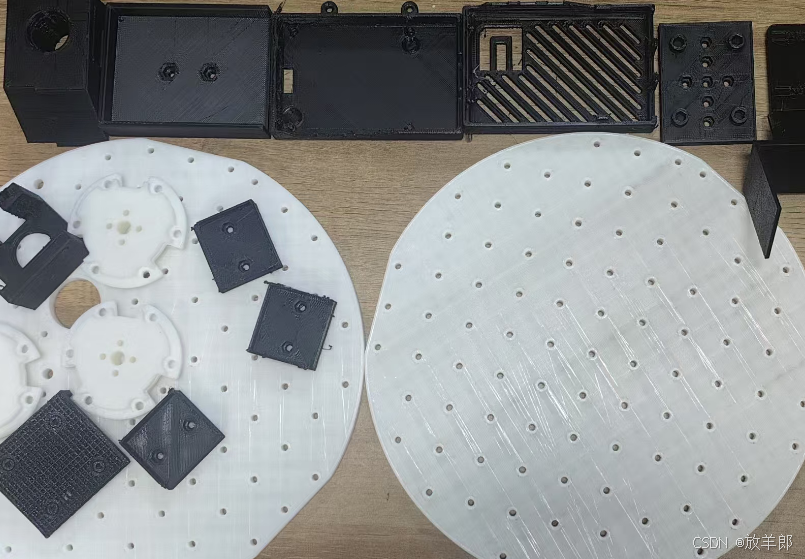
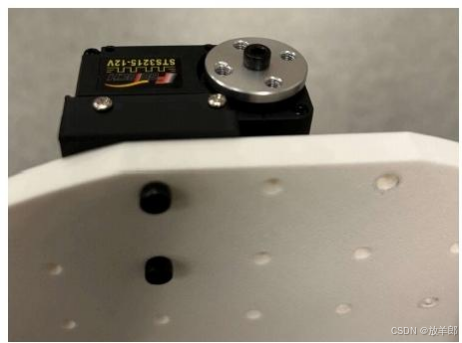
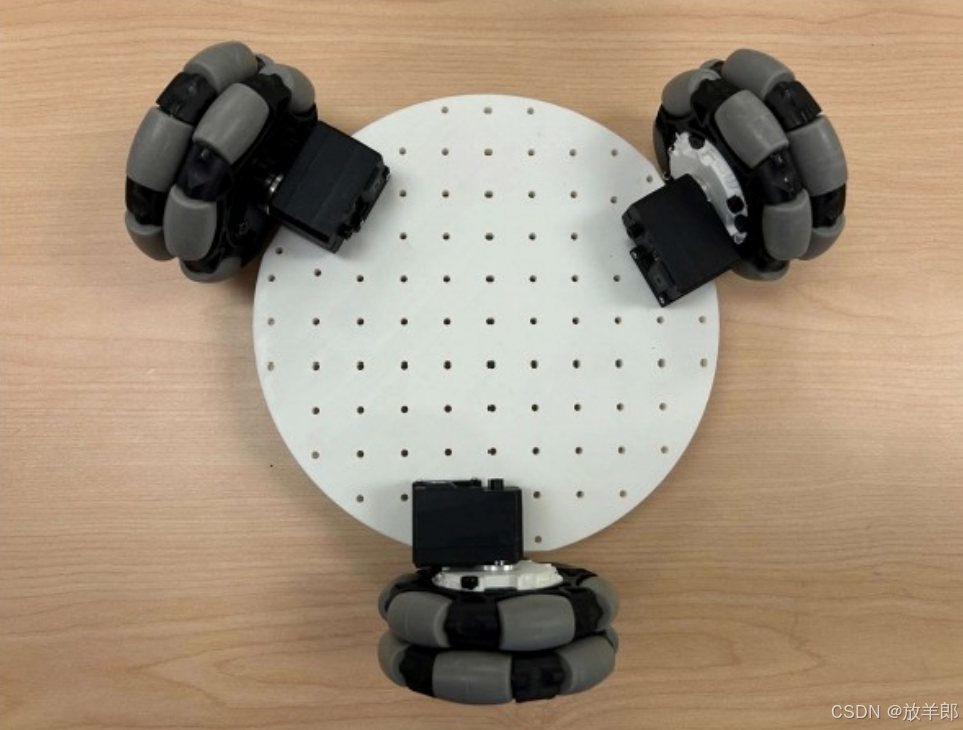
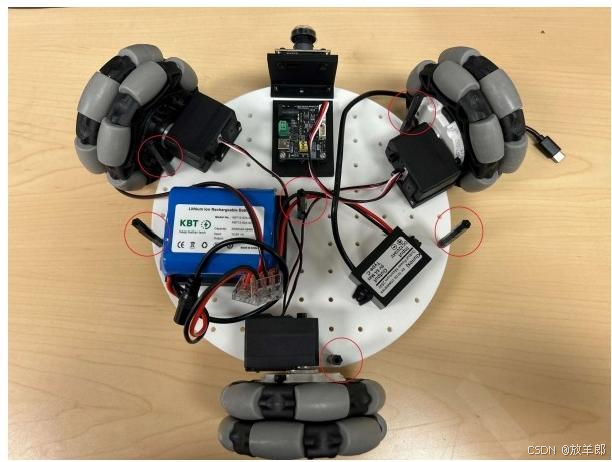
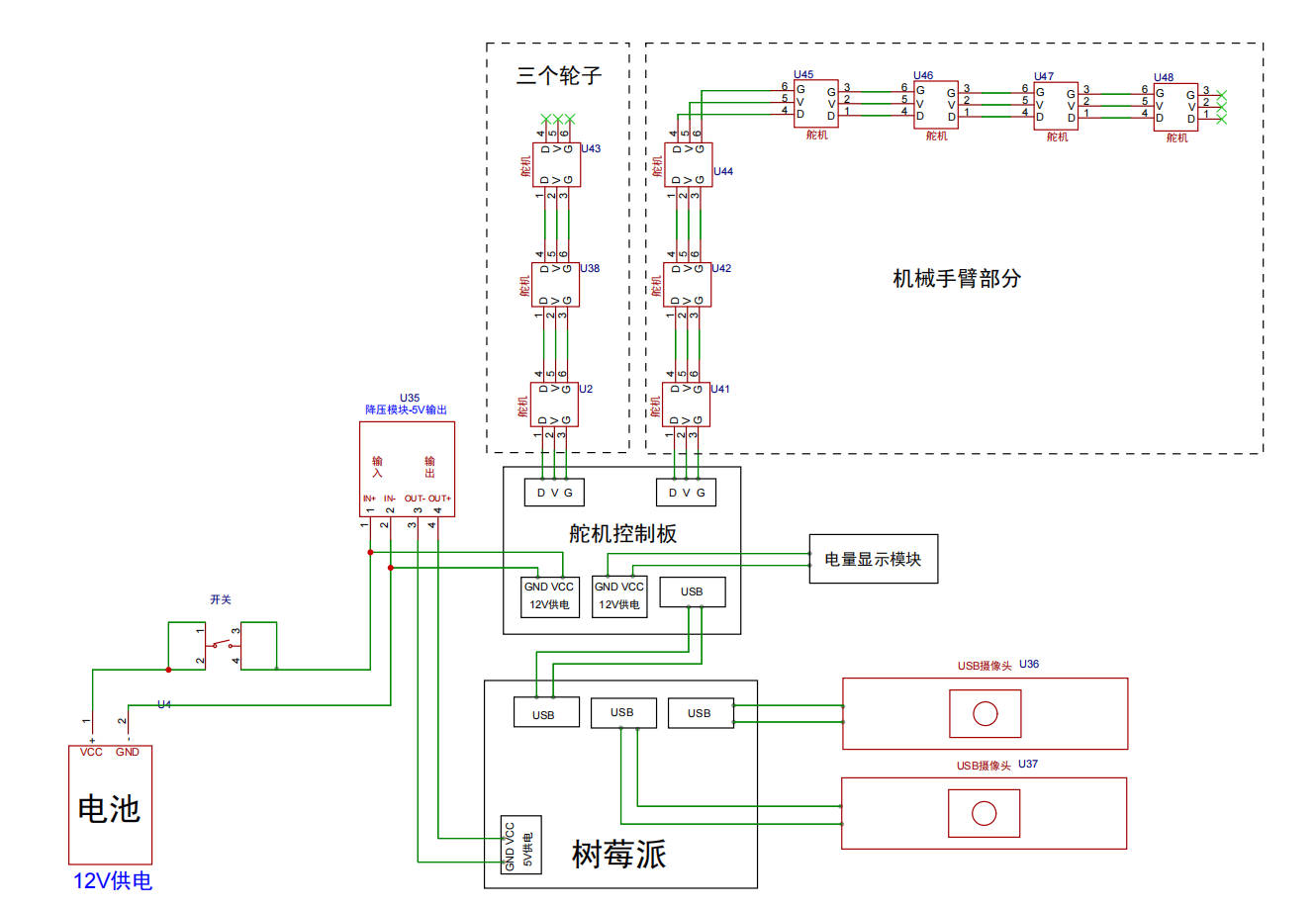
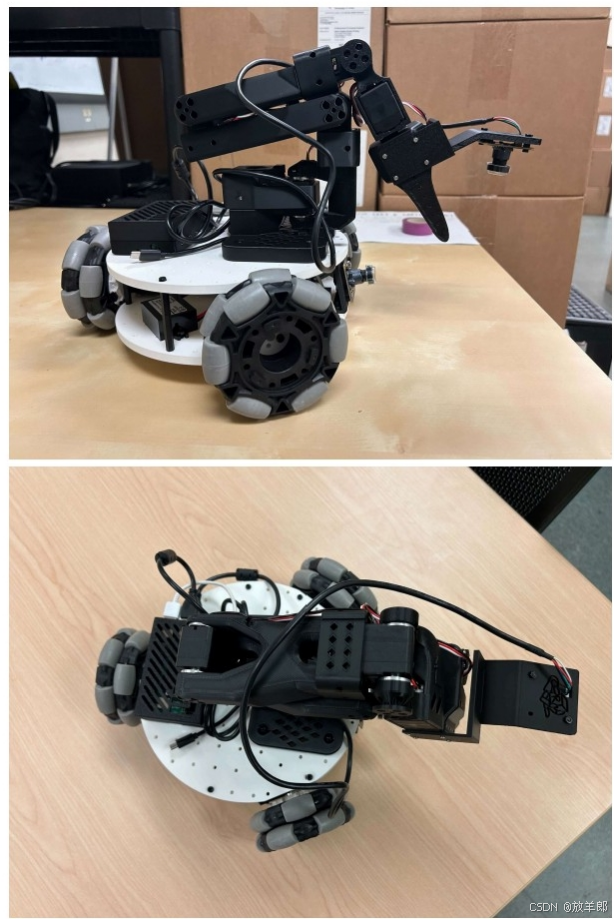
底盘及机械臂组装流程
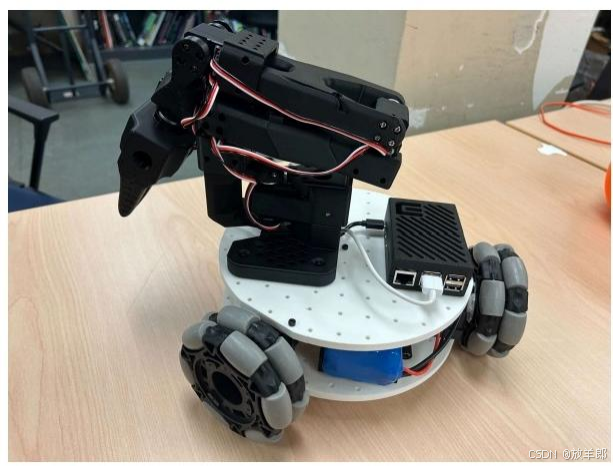
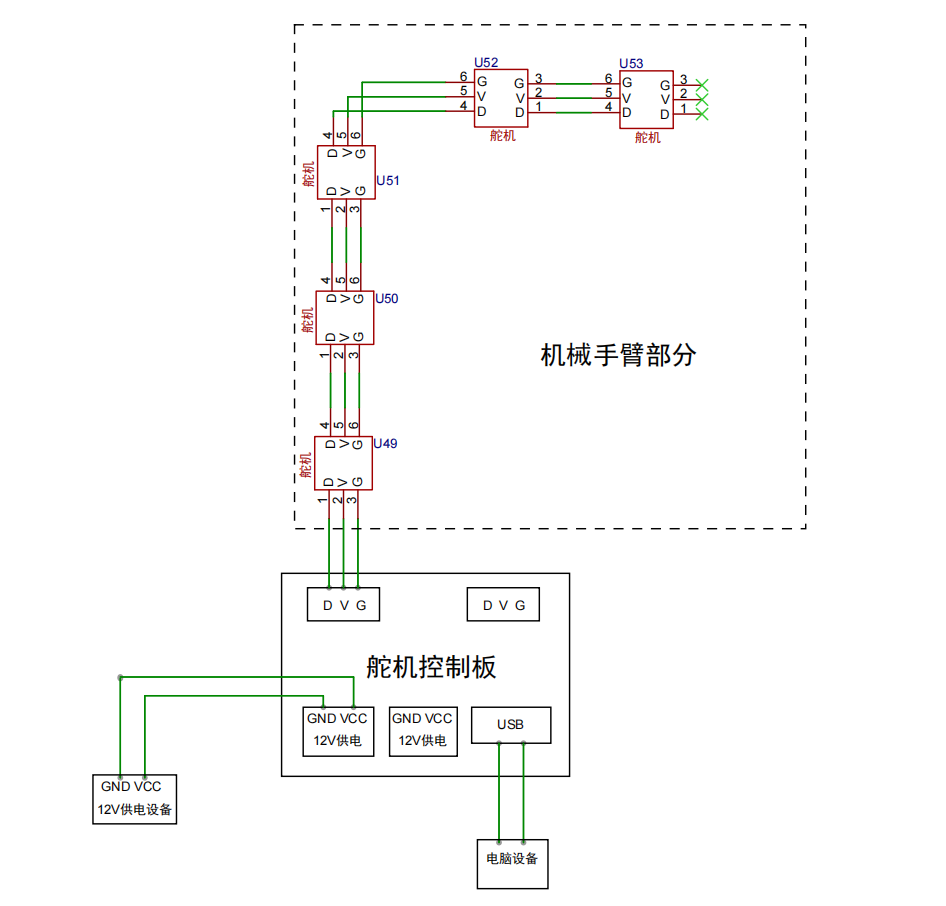
机械臂安装流程
高清版lerobot安装视频
具身开源套件部分课程如下,欢迎联系合作采购(全套开源)
电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐
2026 AI智能体培训市场行业深度观察——“AI智能体元年”,风口还是噱头
世界模型是什么?
2026年5款AI视频文案生成工具对比实测,批量口播脚本如何兼顾爆款逻辑与工程复用?
本文面向短视频运营与内容中台技术团队,实测鲸剪 WhaleClip、剪映、Runway、Descript、Opus Clip 在AI视频文案生成场景下的工程适配性。重点解析鲸剪如何将文案生成嵌入CLI流水线,支撑日更矩阵与数字人驱动闭环。
扫一扫分享内容
为遵守国家网络实名制规定,未绑定将限制内容发布与互动






 2
2 0
0


 已为社区贡献8条内容
2 0
已为社区贡献8条内容
已为社区贡献8条内容
2 0
已为社区贡献8条内容

所有评论(0)