
具身智能零基础小白入门_datawhale_task1
其次可能组织者也没想到,会有我这种零基础中的零基础来学习哈哈哈,所以这篇笔记主要为工科超级小白提供再详细一点的操作流程,必要步骤都会讲,有些很容易就能搜到教程的步骤我会简写,大家可以自行搜索,也当是对自己的一点点锻炼。祝大家有所收获!另外本人水平实在是菜鸟,所以有问题还请大佬们在评论区批评指正!
首先非常感谢datawhale制作了如此内容庞大的教程!
【开源教程】https://github.com/datawhalechina/every-embodied
【参考链接一】:https://blog.csdn.net/yulinlinlighter/article/details/159275716?spm=1001.2014.3001.5501
【参考链接二】:https://my.feishu.cn/wiki/WnLlwd1KQi7syekUyY3csmAEndg
其次可能组织者也没想到,会有我这种零基础中的零基础来学习哈哈哈,所以这篇笔记主要为工科超级小白提供再详细一点的操作流程,必要步骤都会讲,有些很容易就能搜到教程的步骤我会简写,大家可以自行搜索,也当是对自己的一点点锻炼。祝大家有所收获!
另外本人水平实在是菜鸟,所以有问题还请大佬们在评论区批评指正!
【TASK 1】打卡内容
【开源教程】https://github.com/datawhalechina/every-embodied
【学习指南】https://datawhale-eai.feishu.cn/wiki/QvxQwV2Qyij1NakV9IdcjTl1nJd
-------------------------------------------------------------------------------------------------------
【Task 1.0 具身智能概述与发展】/datawhalechina/every-embodied/blob/main/01-具身智能概述/01具身智能概述.md
【Task 1.1 具身导航基础】(优先完成作业):/every-embodied/blob/main/08-具身导航及VLN/02仿真环境基础/habitat导航环境/habitat_lab环境搭建及配置.md/every-embodied/blob/main/08-具身导航及VLN/02仿真环境基础/habitat导航环境/habitat_sim基础实践.md/datawhalechina/every-embodied/blob/main/08-具身导航及VLN/02仿真环境基础/habitat导航环境/habitat_lab基础.md
【Task 1.2 “机器人基础”(运动学)和“控制”(PID算法)】/datawhalechina/every-embodied/blob/main/02-机器人基础和控制、手眼协调/01机器人空间描述与坐标变换.md/datawhalechina/every-embodied/blob/main/02-机器人基础和控制、手眼协调/补充代码教程_Cartpole三种控制算法实战/cartpole建模与控制.md
【Task 1.3 热门内容:春晚机器人复刻】/every-embodied/blob/main/07-机器人操作、运动控制/Locomotion/01春晚舞蹈机器人复刻.md
0.前期准备
0.1.如何访问开源教程
大家可能一上手都会选择打开群公告里的“开源教程”,然后发现,打不开。下载一个watt toolkit就能解决(这个很简单,有很成熟的下载流程,可以自行搜索)。或者群管理员也有分享一些好方法,可以自行尝试。
0.2.检查自己的开发环境
点击开源教程后,先拉到最下面,这里有一个README。
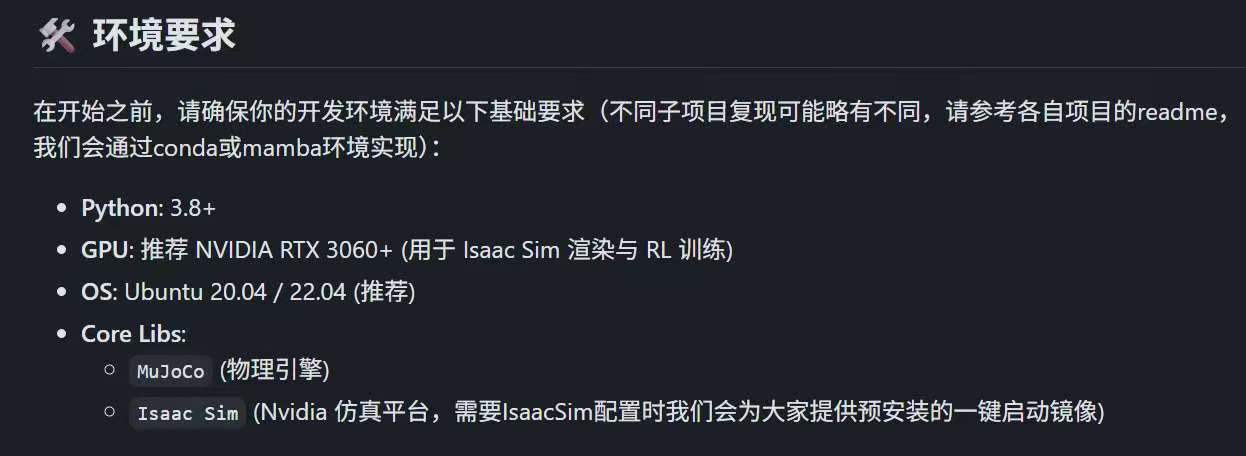
翻过前面的课程目录,会有一个环境要求。就像老年机不能下载微信一样,开发环境不行同样会影响后面仿真情况。
第一个python3.8+,推荐下载python3.9,注意要在基础操作之前尽量下好;第三个OS,是操作系统的意思,比如手机会分安卓系统和苹果的iOS系统,电脑也会分系统。这里的Ubuntu是Linux系统下的系统,但大部分人的电脑都是Window系统,那咋办呢?要么给电脑装一个Linux系统,要么单独开一个WSL2(全称是Windows Subsystem for Linux 2)。
或者在算力平台租服务器用。
0.3.使用线上算力平台进行仿真
回到群公告上面,有一个视频教程【视频教程1:算力自由平台运行habitat仿真】(某书搜标题查找),这时候我们知道了仿真平台叫做habitat。还知道了算力平台的地址。后面就按照这个视频走,注册,然后配环境镜像,等着开机。首次开机时间慢是正常的,我这个也慢。
注意全流程走过以后,你会在云端创建一个实例,后续想要继续这个实例直接开机,不用重复前面配镜像的步骤
视频教程中老师用的已经配好了环境镜像的平台(也就是task1.1的内容都完成了的),咱们先跟老师走一遍看看成果。注意看老师点了哪里,跳转到那些界面。以及在哪个文件夹右键打开终端。视频一定看仔细!得到的这个图像可以用W、A、D、S键进行移动)
1.habitat仿真入门-作业完成
1.0.前期准备工作
视频中老师说了,想要配置环境要跟着13(不是14,口误)文件夹下的【具身智能导航入门实践.md】文档进行学习,所以我们记住这个文档。同时还可在README的视频教程一栏找到对应的教学视频,或某书搜索【具身导航综合入门实践(一)环境基础与安装】。
.md格式的文档就是markdown文档,平常写笔记的时候也可以写markdown格式,比word文档更适合纯爱敲键盘选手写。你就知道这是个看文字的笔记就行。

下面可以开始完成作业。先看Task1.0对这个行业有一点印象,不要纠结于里面的原理。再打开【具身智能导航入门实践.md】完成Task1.1。教程也再次强调,不想配置环境可以直接用镜像。即跳过task1.1。但如果有和我一样轴的小伙伴还是可以自己配一下环境。
1.1. Task1.1完成-平台选择及可能遇到的问题
【具身导航综合入门实践(一)环境基础与安装】视频教程采用的算力平台与【视频教程1:算力自由平台运行habitat仿真】不同,这里采用gpufree。
【具身导航综合入门实践(一)环境基础与安装】前面还是镜像使用方法,3分9秒开始,注意没选择datawhale镜像,而是选了基础镜像,咱们在算力自由平台也做同样操作。此时点击这里打开云服务器界面。

进入gpufree-data文件夹,点击下方终端,进入操作界面。
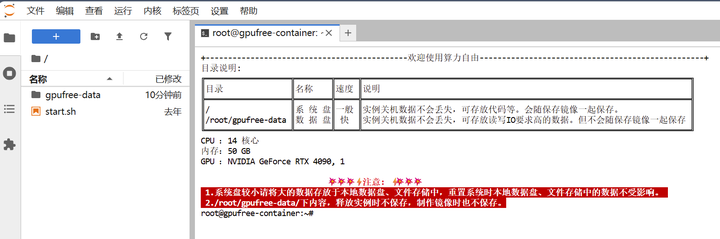
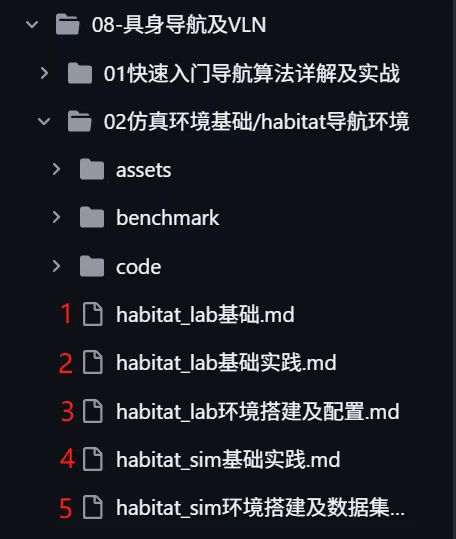
下面的3、4、1是作业要求内容,但阅读【具身智能导航入门实践.md】时我们发现,5才是需要提前进行的,文档5开头也告诉了我们原因:habitat_sim是仿真引擎,habitat_lab则是在此引擎下搭建的算法体系。借用上期大佬的比喻,也就是前者负责渲染游戏画面,后者负责制定游戏规则。所以,一定要先下载habitat_sim,才能下载habitat_lab!!!

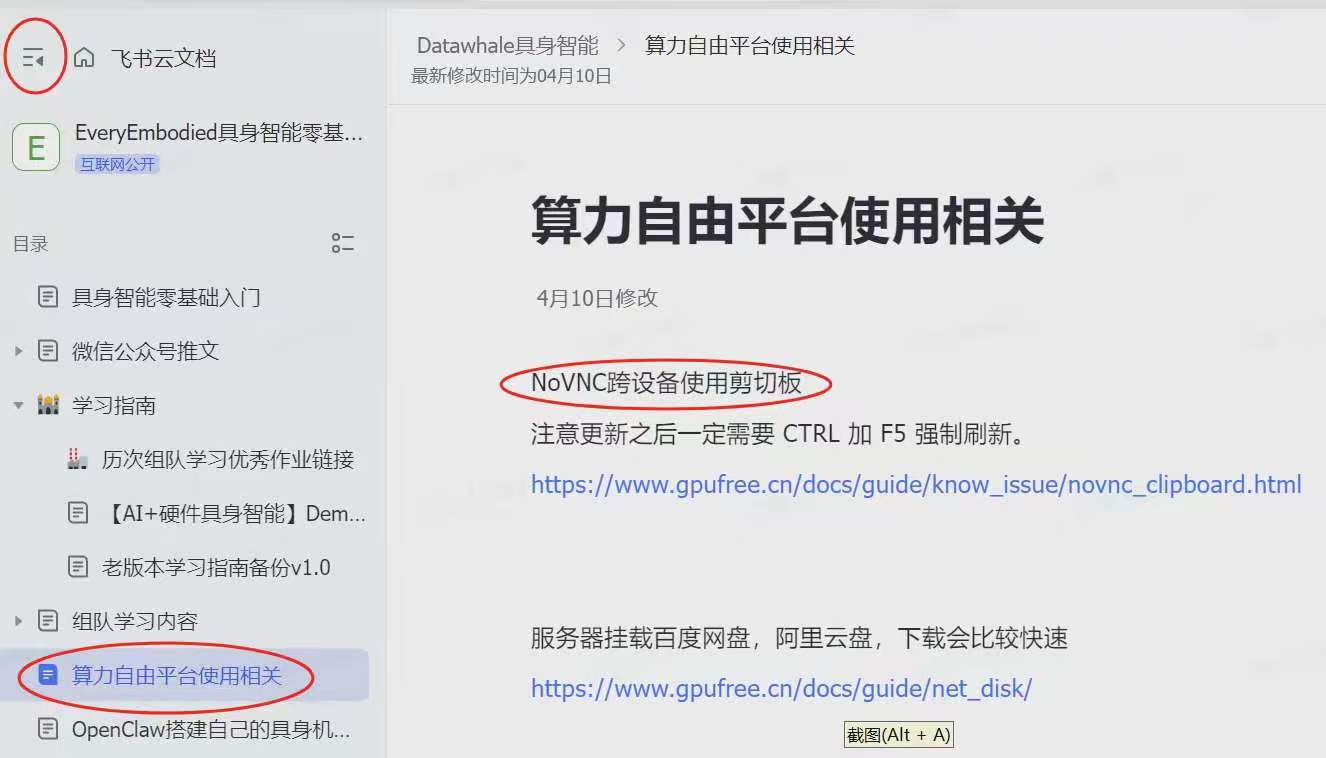
正常情况下现在是可以直接ctrl+c/v进行粘贴。但如果在镜像环境中,想要进行代码跨设备粘贴,需要进行:打开群公告的飞书学习指南,在算力自由平台使用相关目录下查看解决方案。
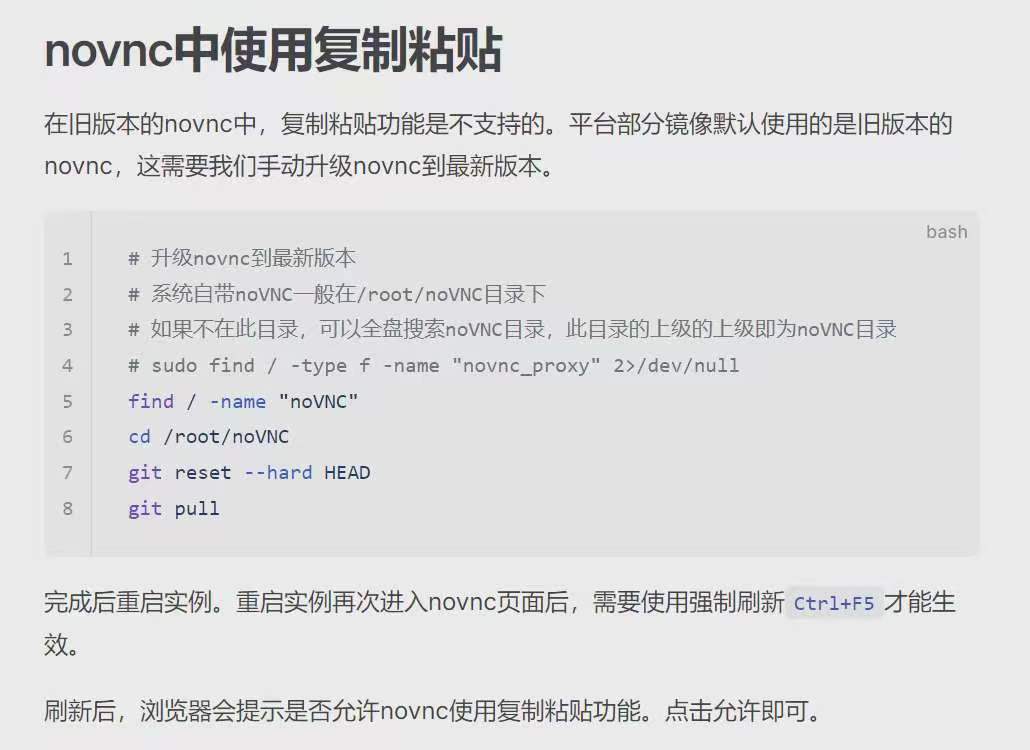
注意这里所说的重启实例是指关机再开机。linux系统的粘贴快捷键是ctrl+shift+v,复制快捷键是ctrl+shift+c。在windows系统正常ctrl+c复制,到服务器上ctrl+shift+v粘贴。(此外,win11快速切换界面的快捷键是alt+esc,相信大家也会用到。)
1.2.非镜像环境Anaconda准备
# 每次只输入一行
# “#”开头的不需要输入
# 注意查看我们租用的是不是linux服务器
# 输入下方代码并回车
cat /etc/os-release
# 找到这两行,检查一下是否符合要求。比如我的显示如图
# NAME="Ubuntu"
# VERSION_ID="22.04"
# 查看版本,后面下载miniconda用,一般都是x86_64
uname -m
# 按照上面的版本号从清华源下载 Miniconda 安装包,可以先进网站看下有哪些版本
wget https://mirrors.tuna.tsinghua.edu.cn/anaconda/miniconda/Miniconda3-latest-Linux-x86_64.sh
# 运行安装脚本
bash Miniconda3-latest-Linux-x86_64.sh
# 看提示的英文,会让按一下回车,再输入yes,再按一下enter,再输入yes。
# 反正看英文提示操作,不确定的话复制问一下AI
#!!!!!装好后关闭当前终端,不是关网页哈!!!!!重开一次终端!!!!!
# 打开新终端后,执行以下命令。这一步就是让 conda 确认你同意使用官方频道的协议。
conda tos accept --override-channels --channel https://repo.anaconda.com/pkgs/main
conda tos accept --override-channels --channel https://repo.anaconda.com/pkgs/r
# 换个新的源,试了一下这个比较快
conda config --add channels https://mirror.nju.edu.cn/anaconda/pkgs/main
conda config --add channels https://mirror.nju.edu.cn/anaconda/pkgs/free
conda config --add channels https://mirror.nju.edu.cn/anaconda/cloud/conda-forge
1.3.habitat仿真环境创建代码全流程梳理
# 若无法一次性下载完,或中途机器卡死,所需要进行的操作为下面标有%%的步骤
# %%配置全局代理(为下载加速)
git config --global url."https://gh-proxy.org/https://github.com/".insteadOf "https://github.com/"
# 创建名为 habitat 的环境,指定 Python 3.9,这个命名跟视频不太一样,注意一下
conda create -n habitat python=3.9 -y
# %%激活环境
conda activate habitat
# 验证 Python 版本,最好是3.9开头
python --version
# conda安装太慢了换成mammba(来自参考链接的提醒)
# 先装 mamba(只需装一次)这个装得慢,稍微等一等
conda install mamba -c conda-forge
# 之后所有 conda install 都可以替换成 mamba install,用法完全一样
# 安装habitat-sim=0.2.5,安装时候会有一些警告和乱码,不用管,没有报错就行
mamba install habitat-sim=0.2.5 withbullet headless -c conda-forge -c aihabitat
# 多装一步代理(为下载加速)
git config --global url."https://gh-proxy.org/https://github.com/".insteadOf "https://github.com/"
# 安装habitat-lab,这里我看的就是前面图片上的作业内容3【habitat_lab环境搭建及配置.md】
git clone --branch v0.2.5 https://github.com/facebookresearch/habitat-lab.git
# %%这一步是跳转文件夹的意思,若中途退出重启需要进行这一步操作
cd habitat-lab
# 下载habitat-lab
# 终端在执行下载命令时尽量不要切换界面吧,不然好不容易加快一点的速度又会变慢。
pip install -e habitat-lab
# 同时安装habitat-baselines
pip install -e habitat-baselines
# 更新一下libEGL库
apt update
apt install -y libegl1-mesa libegl1-mesa-dev libgl1-mesa-glx
# 关掉watt加速器,开一下魔法
# 下载3D场景数据和点导航数据,
# 这第一个文件原则上能下载,但我报错了,顺着提示信息找到文件手动下载
# 自己保存到本地电脑的habitat-test-scenes文件夹(注意用-而不是_)
# 然后整个文件夹拖进gpufree-data/habitat-lab/data/scene_datasets/里
# 或者设置一下镜像源试试
export HF_ENDPOINT=https://hf-mirror.com
git config --global url."https://hf-mirror.com/".insteadOf "https://huggingface.co/"
# 如果在你那边能正常下载当我没说
python -m habitat_sim.utils.datasets_download --uids habitat_test_scenes --data-path data/
python -m habitat_sim.utils.datasets_download --uids habitat_test_pointnav_dataset --data-path data/
# 至此,task1.1的第一个任务【habitat_lab环境搭建及配置】终于完成。
# 继续【Habitat-sim基础实践】
# 下载MP3D的示例场景数据
python -m habitat_sim.utils.datasets_download --uids mp3d_example_scene --data-path data/
单独下载一下测试代码,先保存到本地,新建一个code文件夹,连着文件夹一起拖进虚拟系统的lab文件夹里。
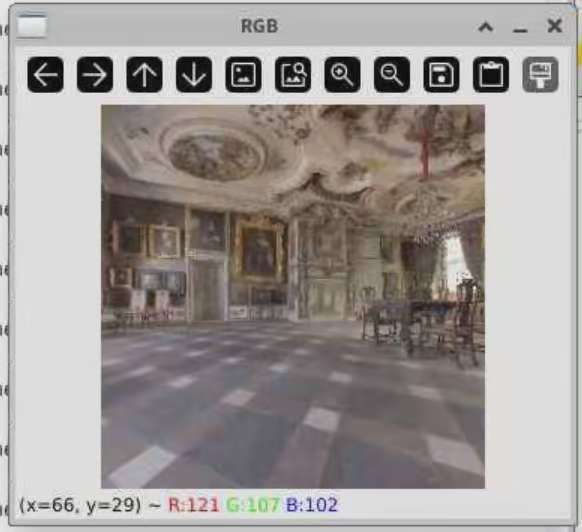
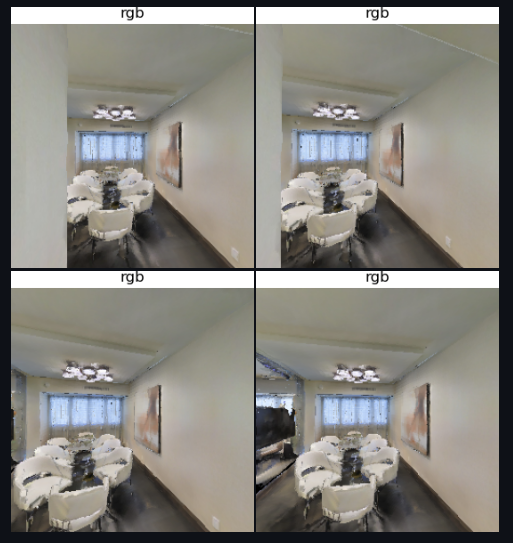
# Habitat-sim基础功能测试,结果已经保存在code/文件夹了,如下图
cd code/
python habitat_test.py
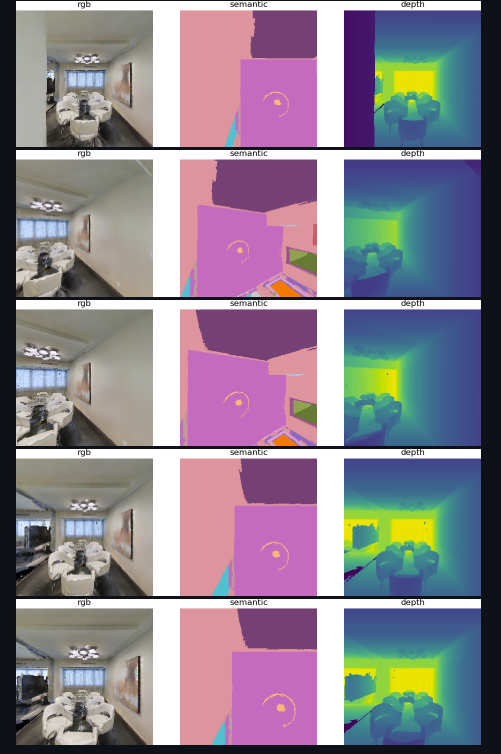
#Habitat-sim进阶配置(见habitat_random.py文件),运行结果如下(同样在code/文件夹里呢)
cd code/
python habitat_random.py
# 来到【habitat_lab基础】,发现重复了前面的步骤,不用管了

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐



 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)