
[具身智能-721]:ros2_control的系统架构、架构设计背后的思想、以及各种配置文件
控制器 - 硬件接口 - 硬件资源。差速驱动、轨迹控制、关节状态发布。,两者协同工作定义整个控制体系。“一次开发,多端复用”
·
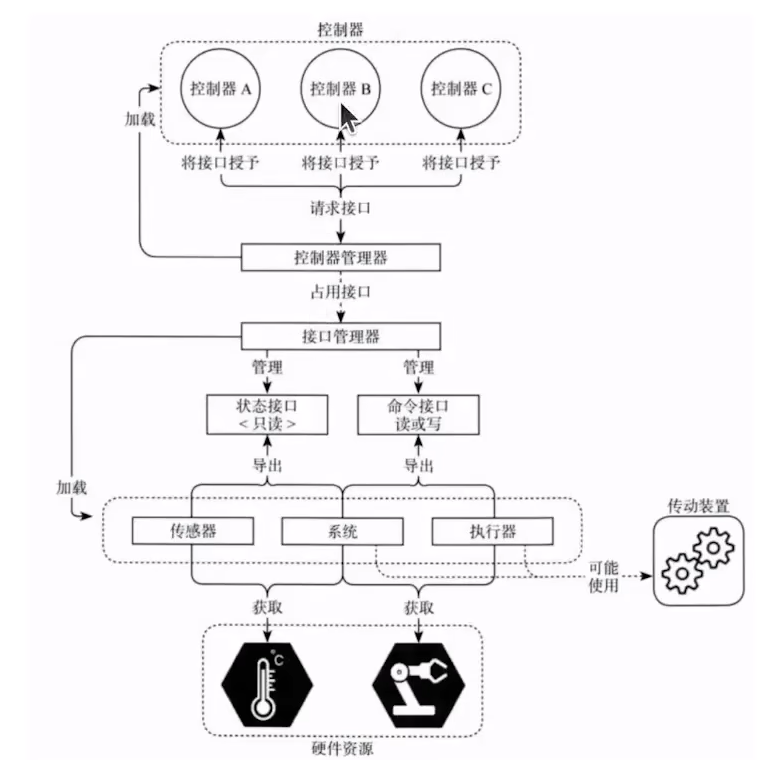
一、ros2_control 系统架构(从图中拆解)
整个架构分为三层,形成了 “控制器 - 硬件接口 - 硬件资源” 的解耦体系:
1. 上层:控制器层(Controllers)
- 角色:控制算法的实现载体(如差速驱动、轨迹控制、关节状态发布)
- 核心组件:控制器 A/B/C(对应不同功能的控制器,如
diff_drive_controller、joint_trajectory_controller) - 交互逻辑:控制器向控制器管理器请求接口,通过接口管理器访问硬件资源
2. 中层:管理与接口层(核心)
这是 ros2_control 的灵魂,包含两个关键模块:
表格
| 模块 | 作用 |
|---|---|
| 控制器管理器(Controller Manager) | 1. 管理控制器的生命周期(加载 / 启动 / 停止 / 卸载)2. 分配硬件接口资源,避免控制器间冲突3. 提供 ROS 服务接口,支持外部控制(如ros2 control命令) |
| 接口管理器(Resource Manager) | 1. 维护硬件接口的读写权限2. 区分状态接口(只读,如传感器反馈)和命令接口(读写,如电机指令)3. 实现接口的互斥访问,保证控制确定性 |
3. 下层:硬件抽象层与硬件资源
- 硬件抽象组件:包含传感器、系统、执行器三类,负责将真实硬件封装成标准接口
- 硬件资源:温度传感器、机械臂末端等物理设备,通过传动装置与执行器交互
二、架构设计背后的核心思想
ros2_control 的设计围绕三大原则展开,完美解决了 ROS1 控制框架的痛点:
1. 硬件无关性(Hardware Agnostic)
- 核心逻辑:通过接口抽象隔离控制算法与硬件实现
- 优势:同一套控制器代码,可同时运行在仿真(Gazebo)和真机上,实现 “一次开发,多端复用”
- 关键体现:控制器只与标准接口交互,不直接依赖硬件驱动细节
2. 模块化与可扩展性(Modularity)
- 控制器、硬件接口、硬件组件均可独立开发、替换
- 支持多控制器同时运行(如关节状态发布器 + 差速控制器),通过控制器管理器统一调度
- 示例:更换底盘结构(差速→麦克纳姆),只需替换控制器,无需修改上层应用(如 Nav2)
3. 确定性与实时性(Determinism)
- 控制器管理器运行在独立的实时控制循环中,与 ROS2 的 DDS 通信解耦
- 接口管理器通过资源锁保证硬件访问的时序确定性,避免多控制器竞争导致的抖动
- 支持自定义更新频率(如 50Hz/100Hz),满足工业机器人的实时控制需求
4. 接口标准化(Interface Standardization)
- 定义了统一的状态接口(
state_interface)和命令接口(command_interface) - 接口类型采用语义化字符串(如
position/velocity/effort),避免强类型耦合 - 任何硬件只要实现了标准接口,就能被 ros2_control 框架直接驱动
三、ros2_control 核心配置文件详解
ros2_control 的配置主要依赖两类文件:YAML 控制器配置文件和URDF/Xacro 硬件描述文件,两者协同工作定义整个控制体系。
1. 控制器配置文件(ros2_control.yaml)
这是控制器管理器的核心配置,定义了要加载的控制器及其参数,结构分为两部分:
(1)控制器管理器配置
yaml
controller_manager:
ros__parameters:
update_rate: 50 # 控制循环频率(Hz)
# 声明要加载的控制器
joint_state_broadcaster:
type: joint_state_broadcaster/JointStateBroadcaster
diffdrive_controller:
type: diff_drive_controller/DiffDriveController
(2)控制器参数配置(以差速驱动为例)
yaml
diffdrive_controller:
ros__parameters:
# 关节名称必须与URDF中定义的完全一致
left_wheel_names: ["wheel_left_joint"]
right_wheel_names: ["wheel_right_joint"]
# 物理参数(决定里程计精度)
wheel_radius: 0.05
wheel_separation: 0.22
# 速度限制
linear: {x: {max_velocity: 1.0}}
angular: {z: {max_velocity: 3.14}}
# 里程计与TF发布配置
odom_frame_id: odom
base_frame_id: base_link
publish_odom: true
publish_tf: true
2. URDF/Xacro 中的硬件描述配置
通过<ros2_control>标签扩展 URDF,定义硬件接口,示例如下:
xml
<ros2_control name="GazeboSystem" type="system">
<hardware>
<!-- 硬件插件,仿真中为gazebo_ros2_control,真机为自定义驱动 -->
<plugin>gazebo_ros2_control/GazeboSystem</plugin>
</hardware>
<joint name="wheel_left_joint">
<!-- 状态接口:只读,获取关节速度反馈 -->
<state_interface name="velocity"/>
<!-- 命令接口:读写,发送关节速度指令 -->
<command_interface name="velocity"/>
</joint>
<joint name="wheel_right_joint">
<state_interface name="velocity"/>
<command_interface name="velocity"/>
</joint>
</ros2_control>
3. 配置文件的协同工作流程
- 启动时,控制器管理器加载
ros2_control.yaml,读取控制器列表 - 控制器管理器解析 URDF 中的
<ros2_control>配置,获取硬件接口信息 - 控制器向控制器管理器请求所需的状态 / 命令接口
- 接口管理器为控制器分配接口权限,建立控制器与硬件的连接
- 控制循环启动,控制器按配置频率读取状态、计算指令、下发命令
四、关键工具与调试命令
- 查看控制器状态:
bash
运行
ros2 control list_controllers
- 查看硬件接口:
bash
运行
ros2 control list_hardware_interfaces
- 手动启停控制器:
bash
运行
ros2 control set_controller_state diffdrive_controller active
电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐

 2
2 0
0- 0



 已为社区贡献201条内容
已为社区贡献201条内容

所有评论(0)