
全域抓取 + VLA 智能赋能|新一代灵巧智能手整体解决方案上线
Blue机器人深耕机器人系统集成领域,针对性推出灵巧手抓取与VLA(Vision-Language-Action,视觉-语言-动作)双方向定制配置,将高精度操作能力与多模态智能理解深度融合,让机器人真正实现“听得懂、看得清、做得准”,适配科研、工业、服务等多场景落地需求。从灵巧手的类人级抓取,到VLA的多模态智能理解,它不再是简单的“执行工具”,而是能与人类自然交互、自主完成复杂任务的“智能伙伴”
在人形机器人产业化加速的今天,“灵活执行”与“智能理解”成为突破应用边界的核心密钥。Blue机器人深耕机器人系统集成领域,针对性推出灵巧手抓取与VLA(Vision-Language-Action,视觉-语言-动作)双方向定制配置,将高精度操作能力与多模态智能理解深度融合,让机器人真正实现“听得懂、看得清、做得准”,适配科研、工业、服务等多场景落地需求。
DexHand 灵巧手系列 —— 打造类人操作的智能机器人末端
在机器人领域,实现类人灵活抓取与精细操作一直是行业研究的核心难题。DexHand 系列灵巧手应运而生,通过创新的机械设计、多模态感知技术及开放的开发生态,为智能制造、科研探索及协作机器人等领域提供了一种全新的操作能力解决方案。

DexHand 系列目前覆盖两款主力产品:高自由度的 DexHand021 五指灵巧手 和 DexHand021s 三指灵巧手 。它们在自由度、感知能力、负载能力与易用性上各具优势,满足不同场景的抓取与操控需求。
高自由度模拟人手动作 —— DexHand021 五指灵巧手
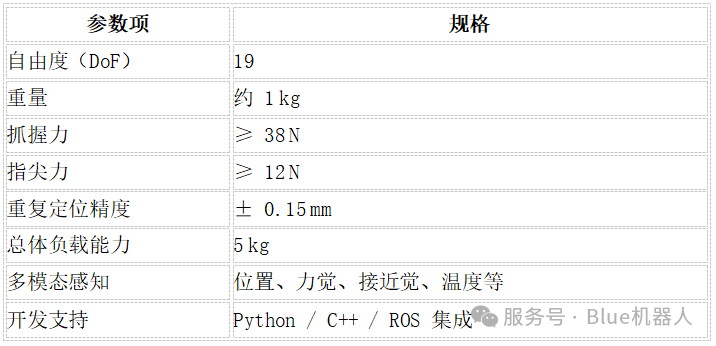
DexHand021 是灵巧智能推出的旗舰级通用灵巧手产品,具备 19 个自由度(DoF) ,其中包括 12 个主动自由度和 7 个被动自由度 ,能够实现类人手的复杂操作与姿态调整。
核心技术优势

-
人体仿生设计的 DexHand021 结构灵感源自人类手部解剖结构,通过腱绳传动机制实现各关节的协同运动。这使其不仅能完成标准抓取,还能执行翻转魔方、捏夹及多目标混合抓取等高级操作。
-
多模态感知系统产品内部集成了位置、法向力觉、切向力觉、接近觉和温度监测等多种传感模式,并融合了23个传感通道。这种感知能力不仅能判定接触状态,还能实现细微力反馈、接近感知和环境感知,从而提升灵巧手对物体的抓取稳定性与操作精度。
-
DexHand021 具备高精度和高重复性,其重复定位精度可达 ±0.15 mm。在执行精密抓取任务时,它能够保持高度一致性,非常适合电子元件装配、实验室操作和微操作任务。
-
强大的负载能力与耐久性。整手在标准抓取模式下的额定负载能力可达5 kg,能够为大多数工业物件提供稳定的抓取能力。此外,其机械寿命可超过百万次循环,大幅降低维护成本并提高设备可靠性。
轻量化与高集成 —— DexHand021s 三指灵巧手
针对工业抓取、物流分拣和机器人研究等场景,DexHand021s 提供了一个轻量级、高灵巧度且易集成的三指方案,同时保持了卓越的可操作性和较强的负载能力。

技术亮点
-
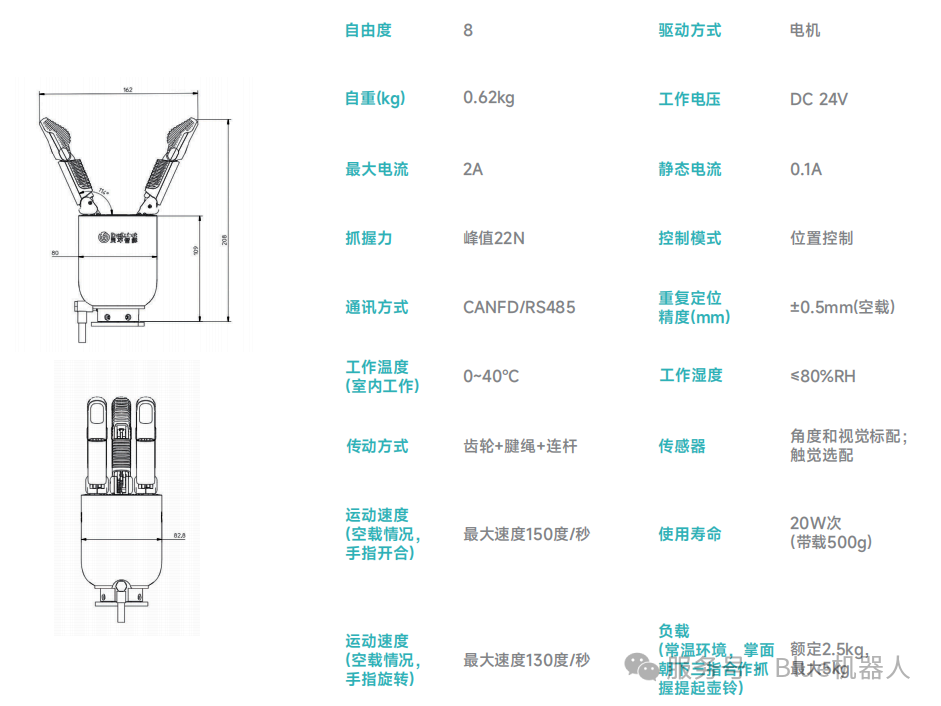
三指设计,操作灵活性强 DexHand021s 采用三指布局,具备 8 个自由度(DoF) ,适合几乎所有标准抓取、夹取和配合任务。
-
轻量化且高可靠性,整机重量仅0.6 kg,大幅降低机器人臂端负载,便于集成于机械臂、协作机器人平台及轻量化移动机器人。该机型在500 g工况下可稳定循环运行20万次以上。
-
持续的抓取能力 单指在指尖、指腹等不同区域的抓握力分别可达 22 N / 44 N / 100 N (峰值),整体抓握时可达 2.5 kg 额定负载 ,峰值可达 5 kg 。
-
多模态感知选择性配置 DexHand021s 标配位置和视觉传感器,并支持法向力、切向力及接近觉等触觉选配,为大部分工业抓取提供足够感知能力。
典型参数对比
灵巧智能灵巧手成套方案:“强力后盾”
Blue机器人的双方向配置,依托灵巧智能灵巧手成套方案的完整生态,不仅提供核心的灵巧手与VLA模块,更配套七轴力控机械臂、动作捕捉系统、推理与训练计算平台等设备,构建起全链条解决方案:
-
七轴力控机械臂:支持高精度位置与力矩控制,具备柔顺控制与碰撞检测能力,与灵巧手无缝协同,实现更精准的动作规划;
-
动作捕捉系统:支持手部与上肢动作实时采集,可用于遥操作示教与模仿学习,快速丰富机器人动作库;
-
高性能计算平台:搭载i9/Xeon等高性能CPU,为VLA模型推理、多模态感知融合提供强大算力支撑,保障操作流畅性。
-
整套方案采用模块化设计,可根据用户需求灵活调整配置,无论是科研机构的技术研发、企业的工业自动化升级,还是服务场景的智能落地,都能提供定制化解决方案,大幅降低部署成本与研发门槛。
B
从灵巧手的类人级抓取,到VLA的多模态智能理解,它不再是简单的“执行工具”,而是能与人类自然交互、自主完成复杂任务的“智能伙伴”——在实验室,它能精准完成微操作实验;在工厂,它能灵活应对柔性装配需求;在服务场景,它能为老人、残疾人提供精细辅助,解锁更多具身智能应用可能。

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐

 7
7 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)