
具身智能中的传感器技术12——IMU技术2
摘要: 人形机器人与自动驾驶对IMU的技术需求差异显著。机器人IMU(6DOF)强调高频响应(带宽>500Hz)、抗震(抗高g冲击)和大动态范围(陀螺仪±2000°/s),适用于剧烈运动场景;而车载IMU更注重长时零偏稳定性(<0.1°/h)和低噪声,适应平稳巡航。机器人因电机振动需强抗干扰能力,自动驾驶依赖高精度惯性导航。典型选型上,机器人采用战术级MEMS(如BMI088),车辆则倾向光纤陀螺
·
摘要:
人形机器人与自动驾驶对IMU的技术需求差异显著。机器人IMU(6DOF)强调高频响应(带宽>500Hz)、抗震(抗高g冲击)和大动态范围(陀螺仪±2000°/s),适用于剧烈运动场景;而车载IMU更注重长时零偏稳定性(<0.1°/h)和低噪声,适应平稳巡航。机器人因电机振动需强抗干扰能力,自动驾驶依赖高精度惯性导航。典型选型上,机器人采用战术级MEMS(如BMI088),车辆则倾向光纤陀螺,两者价格与性能指标差距悬殊,反映运动特性的本质差异。(149字)
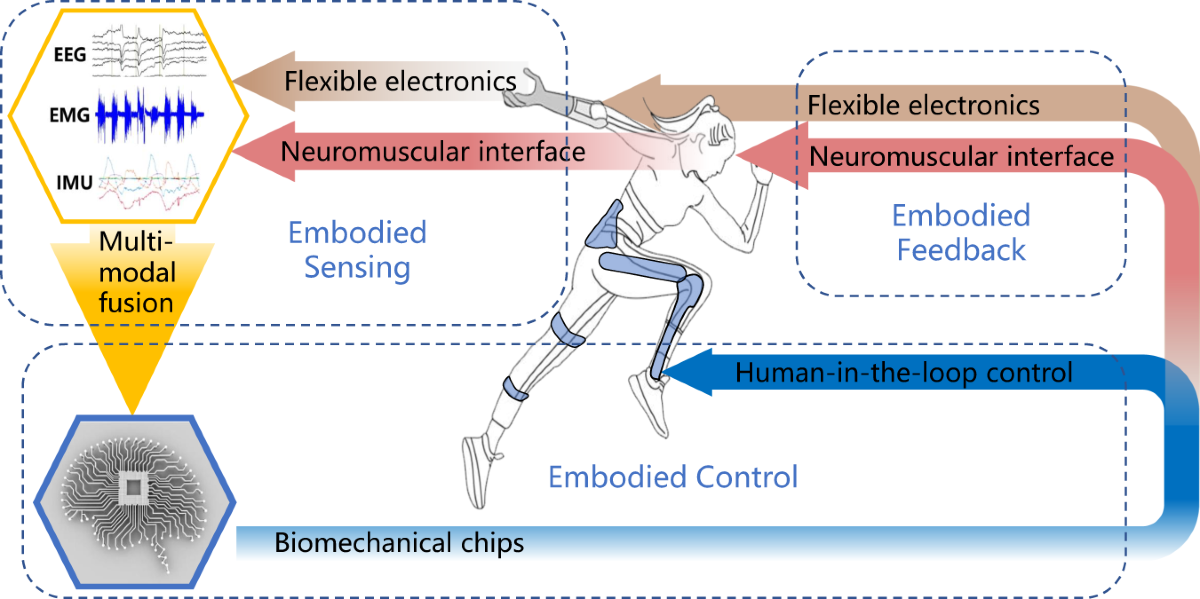
虽然两者都叫 IMU,但由于**人形机器人(高频震动、双足行走)和汽车(平稳行驶、四轮支撑)**的运动学特性截然不同,它们对技术指标的侧重点有明显差异。
1. 具身智能 IMU 是几 DOF (自由度) 的?
标准答案:6 DOF (6自由度)。
- 标配: 3轴陀螺仪 (角速度) + 3轴加速度计 (比力)。
- 为什么不是 9 DOF? 9 DOF 通常多了 3轴磁力计(指南针)。
- 原因: 具身智能机器人通常在室内或充斥着电机(强磁干扰源)的环境工作。磁力计在这些地方基本失效,甚至会引入误差。所以高端机器人算法通常直接无视或阉割磁力计,只信任纯物理的 6轴惯性数据。
- 特殊情况: 有些为了辅助 VIO(视觉惯导),会外挂磁力计,但在核心平衡控制回路中,6 DOF 是绝对主力。
2. 具身智能 IMU vs 自动驾驶 IMU:指标大比拼
核心差异逻辑:
- 具身智能: 追求带宽和抗震。因为机器人关节全是电机和减速器,全是高频震动;且机器人动作(如摔倒、跳跃)极快。
- 自动驾驶: 追求长时精度和零偏稳定性。因为车是长时间巡航,不能越开定位越偏;且车主要在平面运动,动态较慢。
| 指标参数 | 具身智能 IMU (Humanoid Robot) | 自动驾驶 IMU (Autonomous Driving) | 背后的物理原因 (Why?) |
|---|---|---|---|
| 量程 - 陀螺仪<br>(Range - Gyro) | 极高<br>(±2000°/s 甚至 ±4000°/s) | 中等<br>(±300°/s ~ ±500°/s) | 摔倒/空翻瞬间。机器人摔倒或做后空翻时,角速度极快。车正常转弯很少超过 100°/s,除非翻车。 |
| 量程 - 加速度<br>(Range - Acc) | 高<br>(±16g ~ ±30g) | 中等<br>(±6g ~ ±16g) | 足式冲击。脚掌落地瞬间冲击力极大(高达几g甚至十几g)。车有悬挂和充气轮胎缓冲,急刹车也就 1g-1.5g。 |
| 带宽<br>(Bandwidth) | 极宽<br>(> 500Hz, 甚至 1kHz) | 中低<br>(100Hz - 200Hz) | 控制频率。机器人平衡控制回路是 1kHz,IMU 必须比它快,否则相位滞后会导致自激震荡(抖腿)。车的控制频率通常 100Hz 就够了。 |
| 零偏稳定性<br>(Bias Instability) | 中高<br>(1°/h ~ 5°/h) | 极高<br>(< 0.1°/h ~ 1°/h) | 定位时长。机器人主要靠视觉定位,IMU 只负责短时平衡。车在隧道里可能要盲跑几公里,IMU 必须在几分钟内不漂移。 |
| 抗振动性能<br>(Vibration Rejection) | 核心痛点<br>(必须优异) | 一般 | 结构刚度。机器人满身都是谐波减速器(振动源),IMU 就像坐在震动棒上。车有底盘滤波,IMU 工作环境相对舒适。 |
| 随机游走<br>(Angle Random Walk) | 关注度较高 | 关注度极高 | 同样是为了长距离积分定位。 |
| 接口/同步 | SPI / High-speed UART<br>(硬件直连 MCU) | CAN / Ethernet<br>(接入域控制器) | 延迟。机器人要求微秒级读取;车通常走总线。 |
3. 选型举例(感受一下段位差距)
- 自动驾驶 (L4级): 通常用 光纤陀螺 (FOG) 或 高端 MEMS(如 NovAtel, Murata SCHA600)。
- 价格: 几千到几万人民币。
- 特点: 稳如老狗,怎么开都不飘。
- 具身智能 (Tesla Optimus 等级): 通常用 战术级 MEMS(如 BMI088, ADIS16470, Xsens MTi)。
- 价格: 几十到几千人民币。
- 特点: 极其耐摔,反应极快,更能抗高频噪音。
- 普通扫地机/玩具: 消费级 MEMS(如 MPU6050, ICM-42688)。
- 价格: 几块钱。
- 特点: 只能算个大概姿态,稍微剧烈运动数据就不可信了。
总结
具身智能的 IMU 就像体操运动员的前庭(反应快、能抗摔、量程大);
自动驾驶的 IMU 就像马拉松运动员的前庭(耐力好、极其稳定、不跑偏)。

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐

 12
12 0
0- 0



 已为社区贡献42条内容
已为社区贡献42条内容

所有评论(0)