
具身智能中的传感器技术17——关节力矩传感器技术0
摘要:减速器是具身智能关节模组中的关键部件,通过齿轮传动将电机的高转速低扭矩转换为低转速高扭矩。人形机器人主要使用两种减速器:谐波减速器(轻巧精密,用于手臂关节)和行星减速器(耐冲击,用于腿部关节)。谐波减速器利用柔性轮与刚性轮的齿数差实现高减速比,而行星减速器通过行星轮系传递动力。选择依据是:谐波适合需要精细动作的上肢,行星则适用于承受冲击的下肢。
摘要:减速器是具身智能关节模组中的关键部件,通过齿轮传动将电机的高转速低扭矩转换为低转速高扭矩。人形机器人主要使用两种减速器:谐波减速器(轻巧精密,用于手臂关节)和行星减速器(耐冲击,用于腿部关节)。谐波减速器利用柔性轮与刚性轮的齿数差实现高减速比,而行星减速器通过行星轮系传递动力。选择依据是:谐波适合需要精细动作的上肢,行星则适用于承受冲击的下肢。
在具身智能关节模组中,减速器 (Reducer) 扮演着“力量倍增器”的角色。
电机通常是**“高转速、低扭矩”的(转得快但劲儿小),而机器人关节需要的是“低转速、高扭矩”**(转得慢但劲儿大)。减速器的作用就是通过齿轮传动,将电机的速度降下来,同时将扭矩放大 50-100 倍。
在人形机器人中,主要使用两种精密减速器:谐波减速器(用于手臂/腿部轻载关节)和 行星减速器(用于腿部重载关节)。
一、 谐波减速器 (Harmonic Drive) —— 机器人的“手臂关节”
特点: 体积极小、重量轻、零背隙(无间隙)、单级减速比大。
缺点: 柔性轮较薄,承载能力弱,不耐冲击(摔一下容易坏)。
1. 结构组成(只有三个零件)
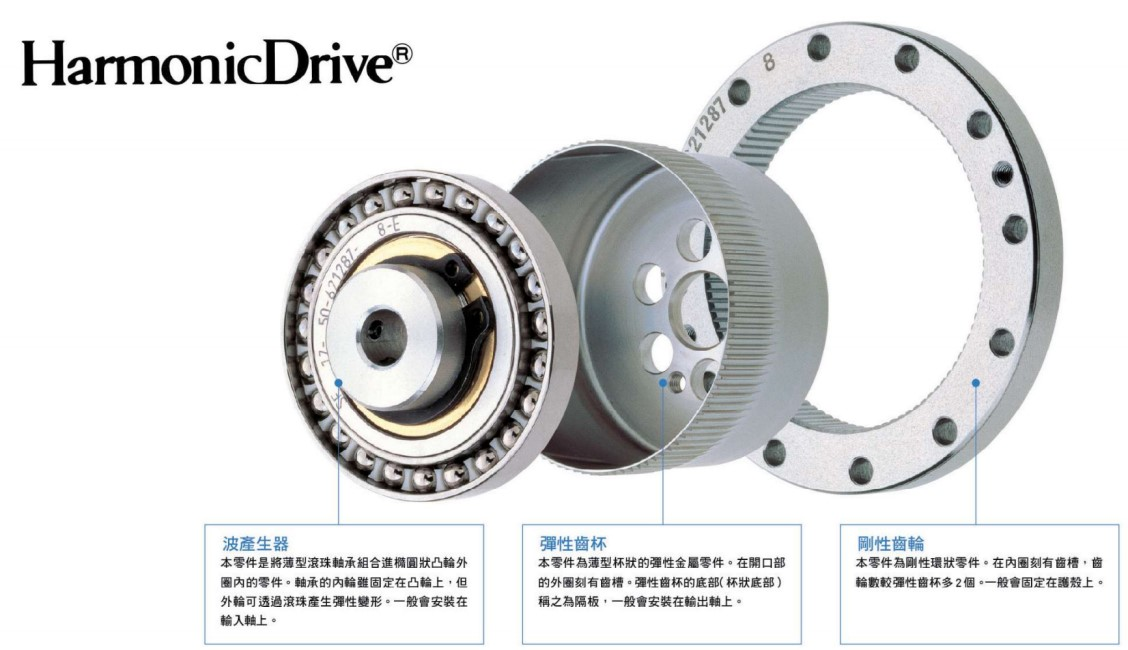
谐波减速器的结构极其精妙,由三个同心部件组成:
- 波发生器 (Wave Generator):
- 是什么: 一个椭圆形的凸轮,外面套着一个薄壁轴承。
- 连哪里: 连接电机轴(输入端)。
- 柔轮 (Flexspline):
- 是什么: 一个像杯子一样的薄壁金属圆筒,杯口有一圈外齿。它是有弹性的,可以变形。
- 连哪里: 连接机器人手臂(输出端)。
- 刚轮 (Circular Spline):
- 是什么: 一个刚性的内齿圈。
- 连哪里: 固定在关节外壳上(不动)。
2. 减速原理(错齿运动)
核心魔法在于:柔轮的齿数比刚轮少 2 个(通常)。
- 当椭圆形的波发生器装入柔轮时,柔轮被迫变成了椭圆形。
- 椭圆的长轴两端,柔轮的齿与刚轮的齿完全啮合。
- 电机带动波发生器转一圈 (360°):
- 波发生器撑着柔轮在刚轮里面“挤”了一圈。
- 因为柔轮比刚轮少 2 个齿,所以刚轮没动,柔轮被迫向反方向错位了 2 个齿的角度。
- 结果: 电机转得飞快(一圈),柔轮只慢悠悠地转了一点点(2个齿的角度)。这就是巨大的减速比(例如 100:1)。
二、 行星减速器 (Planetary Gear) —— 机器人的“大腿关节”
特点: 刚性好、承载能力极强、耐冲击、效率高。
缺点: 体积稍大、重量稍重、通常很难做到零背隙(有微小晃动)。
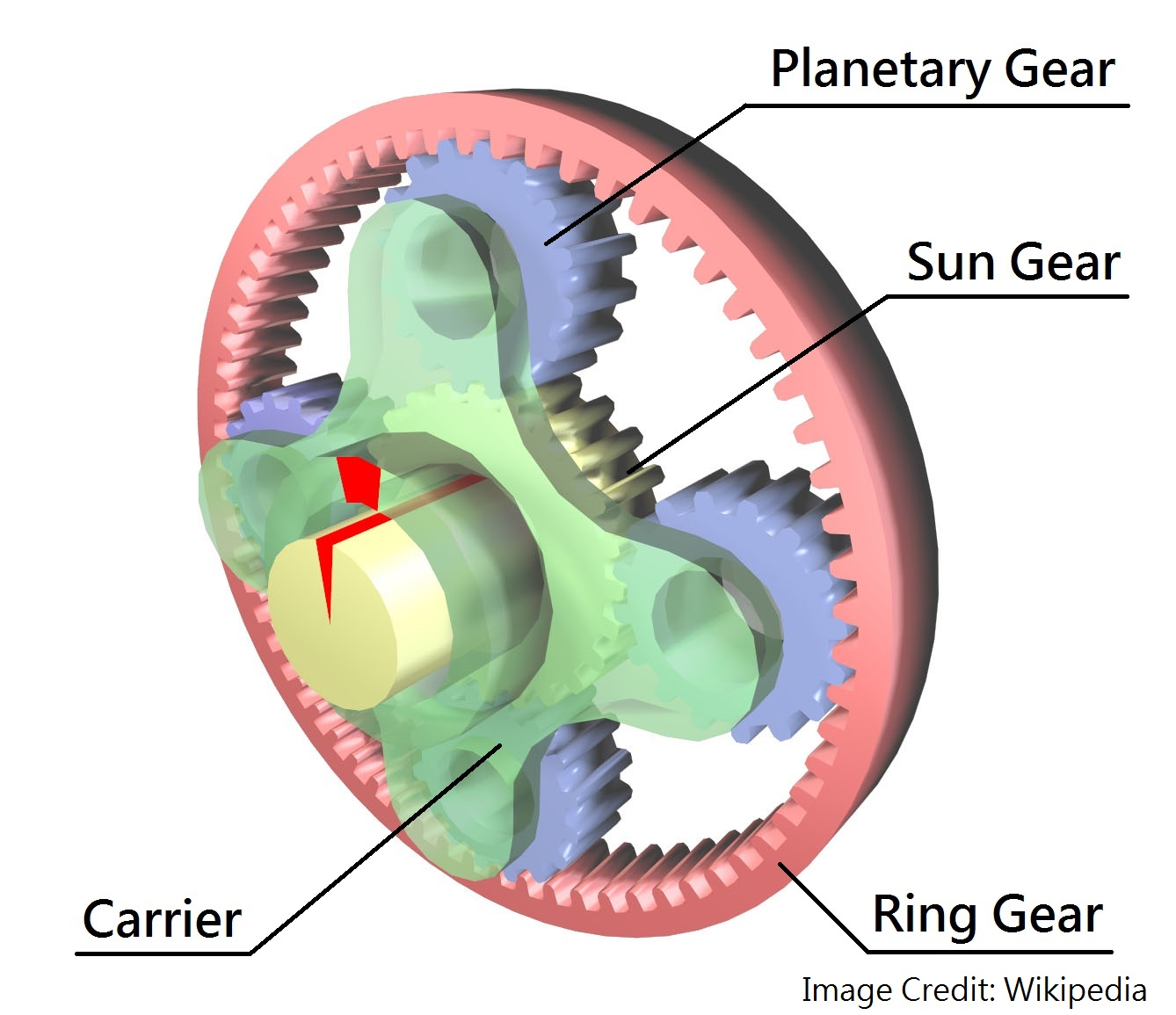
1. 结构组成(像太阳系一样)
- 太阳轮 (Sun Gear):
- 位于正中心,连接电机轴(输入)。
- 行星轮 (Planet Gears):
- 通常有 3-4 个,围绕着太阳轮转。
- 行星架 (Planet Carrier):
- 将所有行星轮固定在一起的支架,通常连接机器人大腿(输出)。
- 齿圈 (Ring Gear):
- 最外圈的内齿环,固定在外壳上不动。
2. 减速原理
- 电机带动中间的太阳轮高速旋转。
- 太阳轮驱动周围的行星轮转动。
- 因为最外面的齿圈是锁死的,行星轮被迫一边自转,一边沿着齿圈内壁公转。
- 行星轮的公转带动行星架慢速旋转,输出巨大的扭矩。
三、 为什么具身智能要用这两种?
| 减速器类型 | RV 减速器 (工业机器人用) | 谐波减速器 (具身智能用) | 行星减速器 (具身智能用) |
|---|---|---|---|
| 特点 | 傻大黑粗,极度耐造,重。 | 小巧玲珑,精度极高,轻。 | 结实耐用,爆发力强。 |
| 应用 | 工厂里的机械臂底座(几百公斤负载)。 | 人形机器人的肩膀、手肘、手腕。 | 人形机器人的髋部、膝盖(有些方案用,如宇树)。 |
| 原因 | 太重了。人形机器人背不动。 | 轻量化是第一要义。 | 需要对抗跑跳时的地面冲击力,谐波可能会碎,行星能抗住。 |
总结:
- 想要机器人手巧、动作细腻?用 谐波。
- 想要机器人腿脚好、能跑能跳?用 行星(或摆线针轮)。
- 想要机器人搬砖、造车?用 RV(那是传统工业机器人的地盘)。

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐
 10
10 0
0- 0



 已为社区贡献43条内容
已为社区贡献43条内容

所有评论(0)