
基于InstaSPIN-user‘s guide Foc电流环速度环PI参数计算过程
这次先直接说明计算过程,推导过程暂不注释。1、参数结论 PI控制器有串联有并联,以串联为基础。结论:电流环:速度环:使用以下公式计算支持设计要求所需的电流环路带宽(通过曲线拟合分析获得):BWc是电流环带宽Kp是电流环参数L是电机电感BWs是速度环带宽δ是阻尼因子2、实际例子计算24V永磁同步电机具有以下特点:Rs = 0.4 ohmsLs = 0.6 ...
这次先直接说明计算过程,推导过程暂不注释。
1、参数结论
PI控制器有串联有并联,以串联为基础。
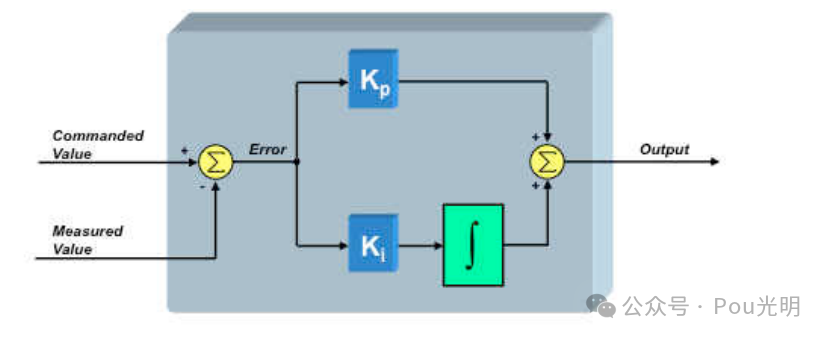
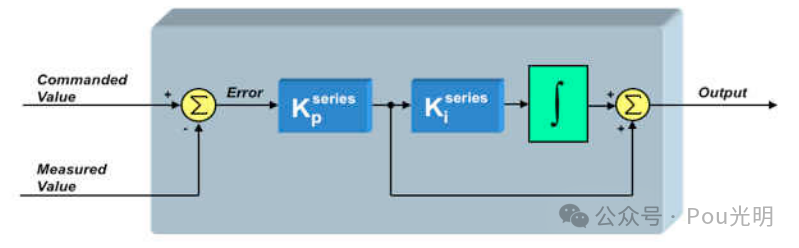
结论:
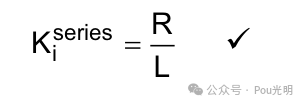
电流环:

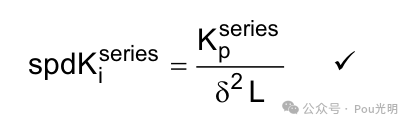
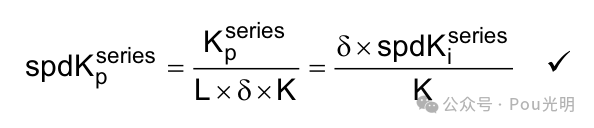
速度环:
使用以下公式计算支持设计要求所需的电流环路带宽(通过曲线拟合分析获得):

BWc是电流环带宽
Kp是电流环参数
L是电机电感
BWs是速度环带宽
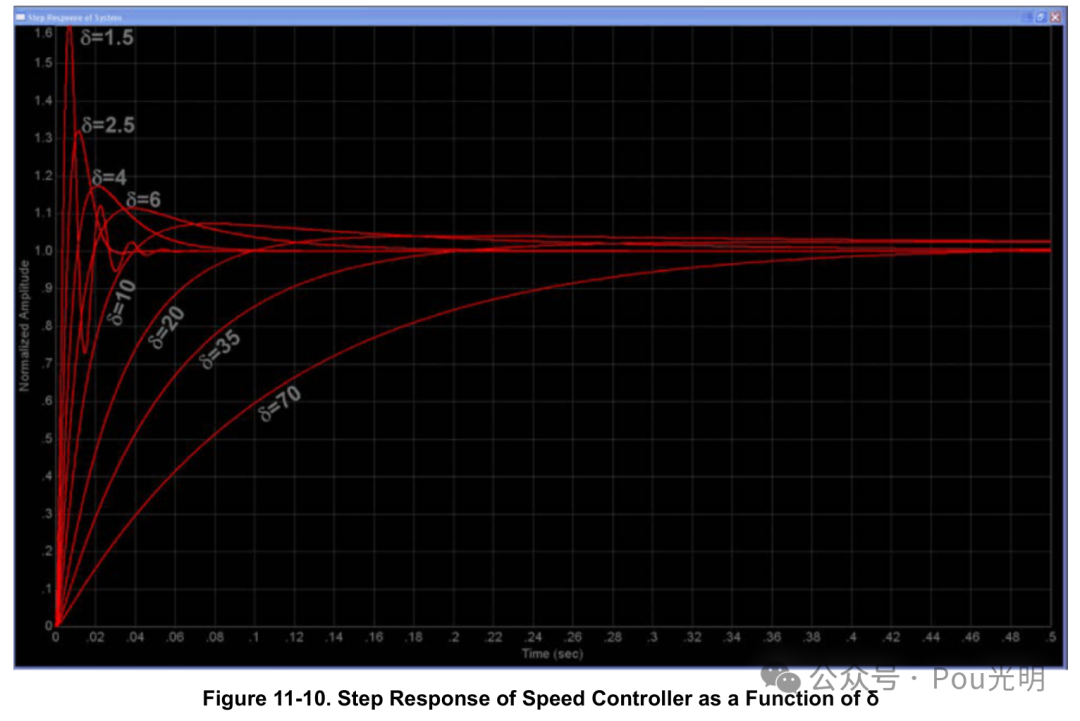
δ是阻尼因子
2、实际例子计算
24V永磁同步电机具有以下特点:
Rs = 0.4 ohms
Ls = 0.6 mH
Back-EMF = 0.0054 v-sec/radians (peak voltage phase to neutral, which also equals flux in Webers in the SI system)
Inertia = 2E-4 kg-m2
Rotor poles = 8
所需速度带宽 = 800 弧度/秒,我们希望阻尼因子 (δ) 为 4。找到所需的电流环路带宽以支持速度环路带宽,然后计算四个 PI 系数。

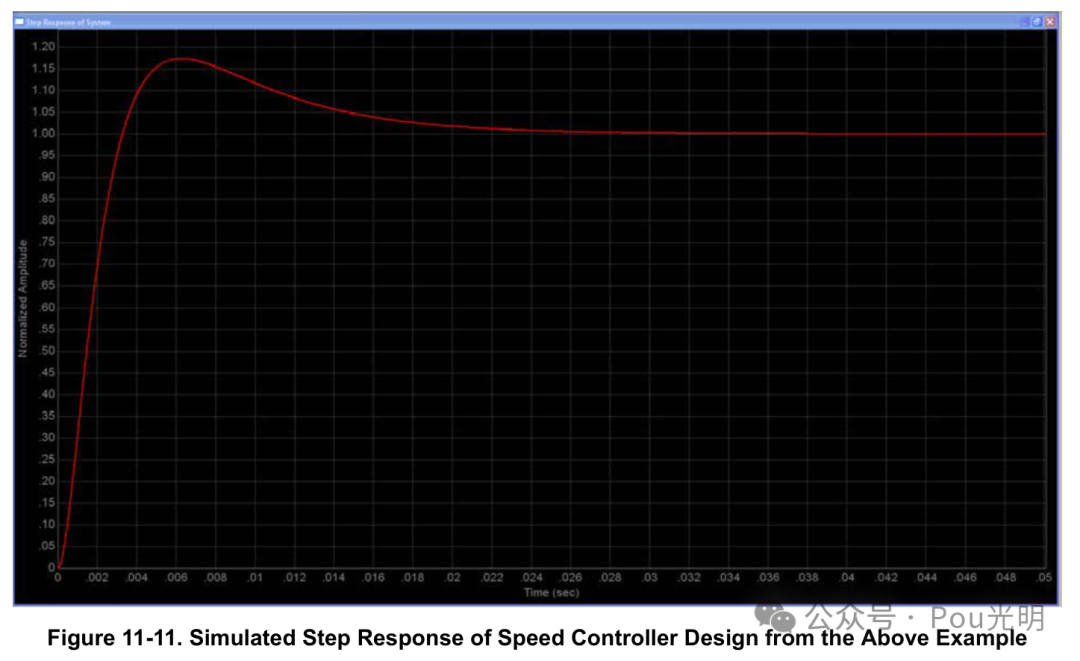
则可计算出Kp:





图 11-11 显示了此示例的模拟速度瞬态阶跃响应,其中时间轴现在已根据此设计示例进行了适当缩放。
我们将其中的“δ”定义为阻尼因子。δ越大,零转角频率和电流环路极点之间的距离就越大。它们之间的距离越大,相位裕度就可以在这些频率之间达到更高的峰值。这可以提高稳定性,但代价是速度环路带宽。如果δ = 1,则零转角频率和电流环路极点相等,从而导致极点/零点抵消,系统将不稳定。理论上,由于相位裕度> 0,任何δ> 1的值都是稳定的。但是,δ接近1的值会导致严重的阻尼不足性能。
一旦我们定义了内环电流控制器的参数,我们就会选择一个阻尼因子 (δ) 的值,该值允许您精确量化速度环路稳定性和带宽之间的权衡。然后计算 spdKpseries 和 spdKiseries 就很简单了。
这种方法的好处是,您无需尝试根据经验调整四个看似与系统性能关系不大的 PI 系数,只需定义两个有意义的系统参数:
电流控制器的带宽和速度环路的阻尼系数。一旦选择了这些,就会自动计算四个 PI 系数。
我试了计算出来的参数,电机可以转,但是震感很强,还需要继续调试。

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐

 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)