
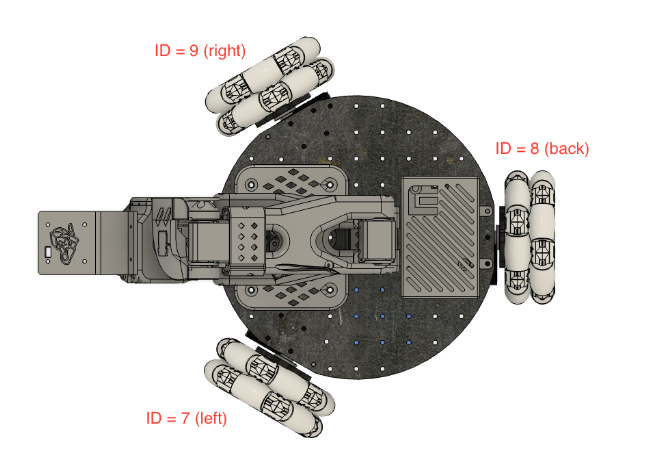
6. 机器人标定(具身智能机器人套件)
在连接了机械臂的电脑上执行下面脚本,进行标定,位置跟车载方案一致。机械臂连接到树莓派,在树莓派上执行下面脚本,启动标定。
·
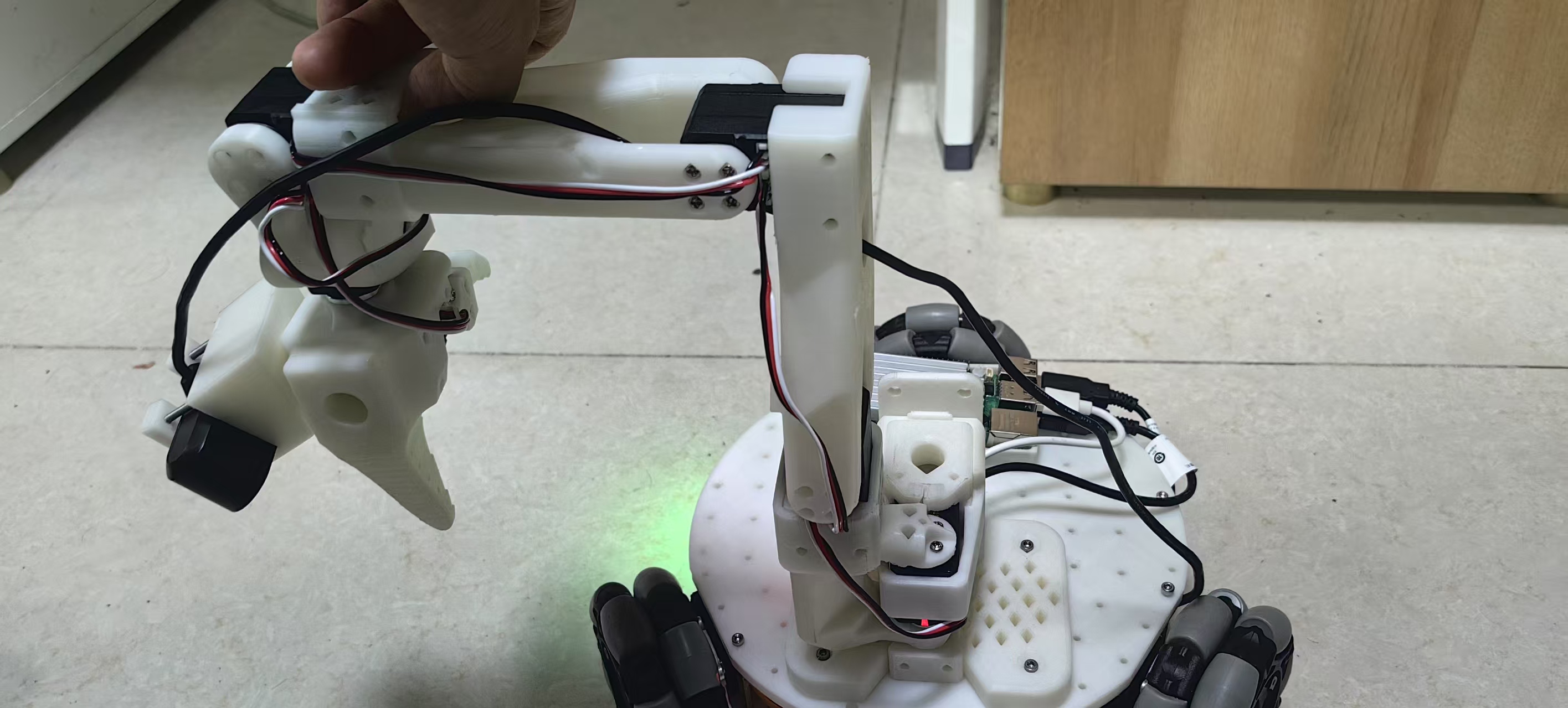
1. 车载机械臂标定(从机械臂)
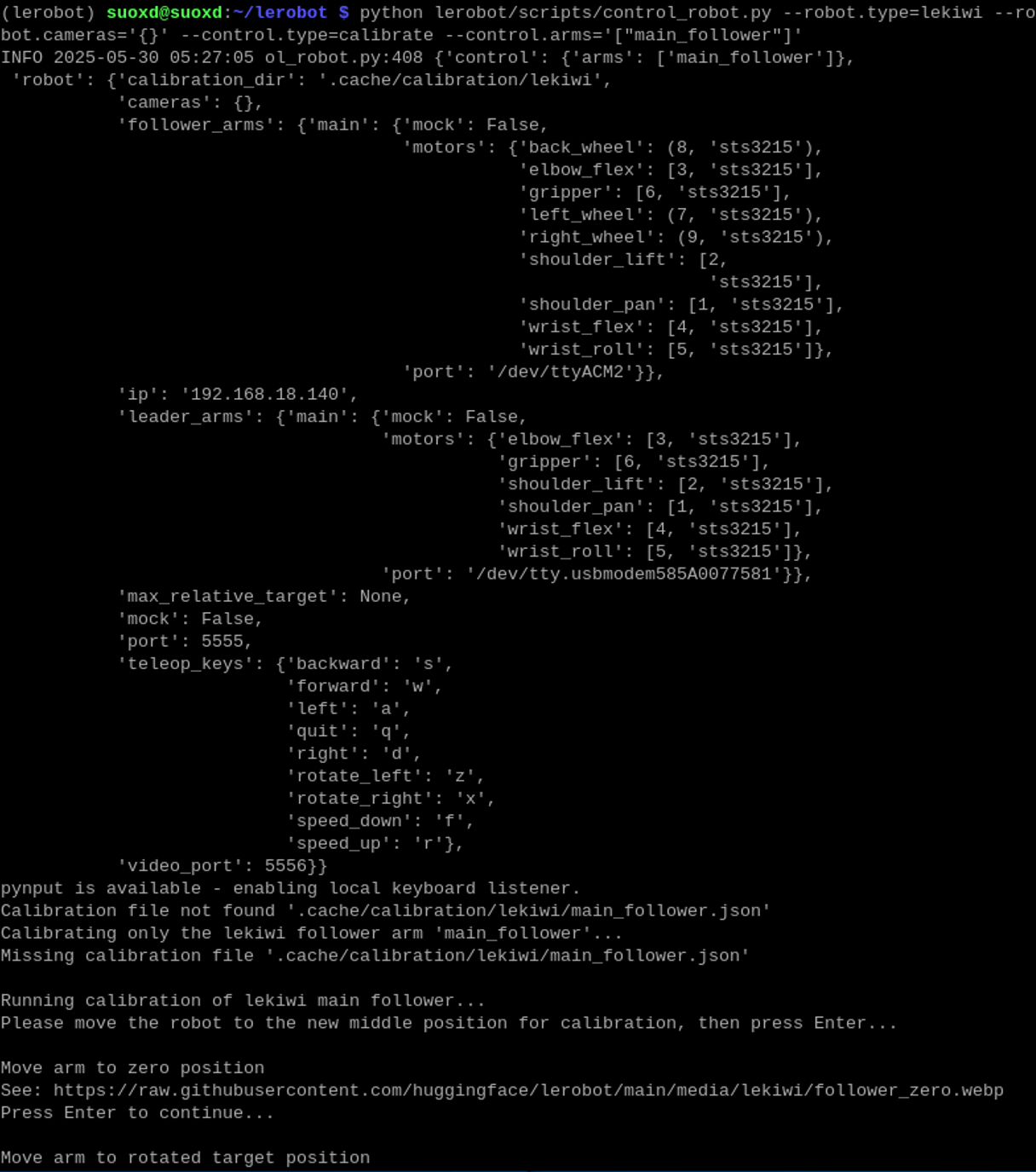
机械臂连接到树莓派,在树莓派上激活conda虚拟空间后,执行下面脚本启动标定
python lerobot/scripts/control_robot.py \
--robot.type=lekiwi \
--robot.cameras='{}' \
--control.type=calibrate \
--control.arms='["main_follower"]'
-
车载臂中间位置(new middle position)

-
车载臂零位( zero position)

-
车载臂旋转位(rotated target position)
-
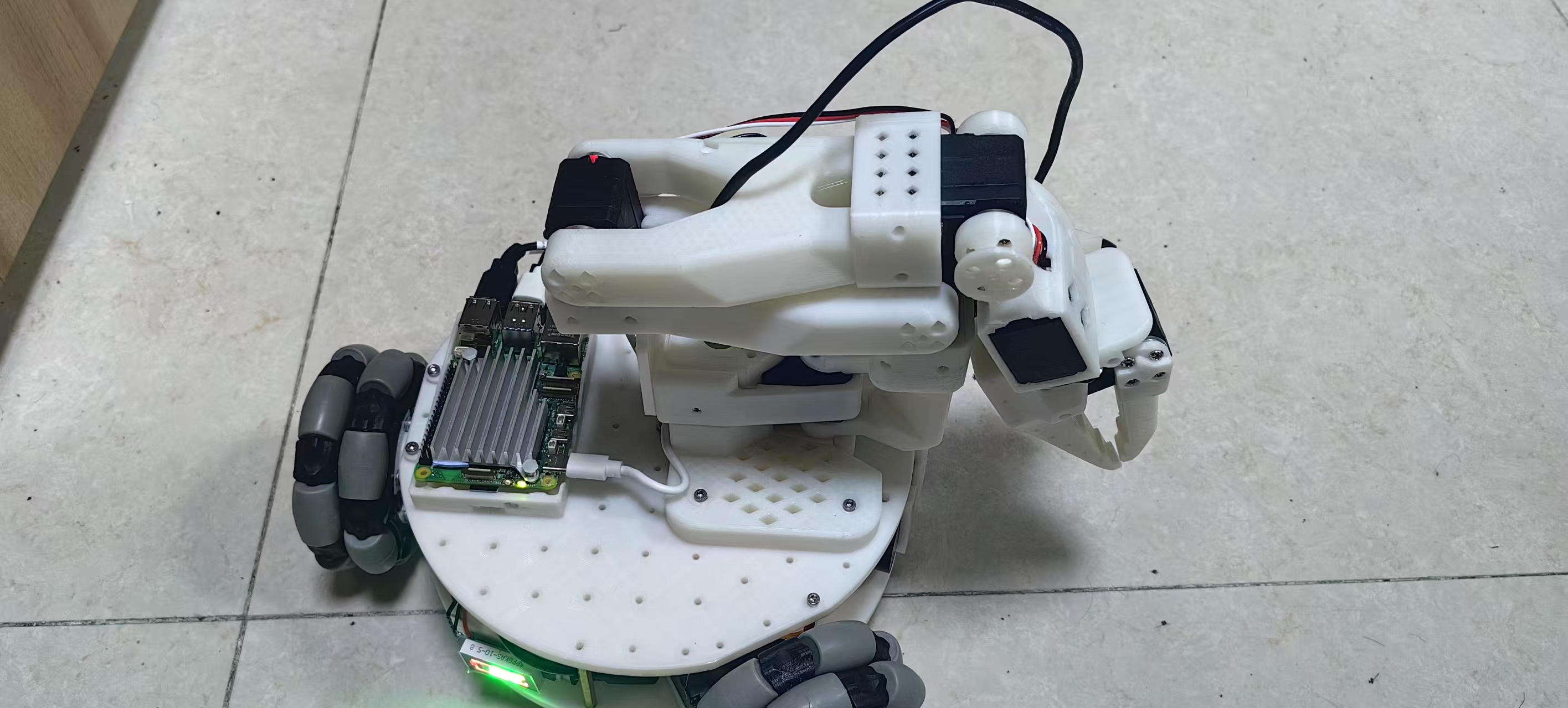
车载臂就绪等待位(rest position)
2. 桌面机械臂标定
机械臂直接连接电脑后,启动虚拟环境,在连接了机械臂的电脑上执行下面脚本,进行标定,位置跟车载方案一致。
python lerobot/scripts/control_robot.py --robot.type=lekiwi --robot.cameras={} --control.type=calibrate --control.arms=[\"main_leader\"]
-
桌面臂中间位(new middle position)

-
桌面臂零位(zero position)

-
桌面臂旋转位(rotated target position)

-
桌面臂就绪等待位(rest position)


3. 最终标定文件内容
自动创建两个标定文件,标定之前存在则会删除重建
- follower(车载)
{“homing_offset”: [-2200, 3039, -1068, -1982, 2114, -2333, 603, -1933, -1223], “drive_mode”: [0, 1, 0, 0, 1, 0, 0, 0, 0], “start_pos”: [2049, 3102, 1061, 2048, 2036, 2048, 420, 2952, 2246], “end_pos”: [3224, -2015, 2092, 3006, -1090, 3357, 421, 2957, 2247], “calib_mode”: [“DEGREE”, “DEGREE”, “DEGREE”, “DEGREE”, “DEGREE”, “LINEAR”, “DEGREE”, “DEGREE”, “DEGREE”], “motor_names”: [“shoulder_pan”, “shoulder_lift”, “elbow_flex”, “wrist_flex”, “wrist_roll”, “gripper”, “left_wheel”, “back_wheel”, “right_wheel”]} - leader
{“homing_offset”: [-2031, 3024, -1063, -1921, 2076, -2147], “drive_mode”: [0, 1, 0, 0, 1, 0], “start_pos”: [1995, 3012, 1097, 2048, 2047, 2047], “end_pos”: [3055, -2000, 2087, 2945, -1052, 3171], “calib_mode”: [“DEGREE”, “DEGREE”, “DEGREE”, “DEGREE”, “DEGREE”, “LINEAR”], “motor_names”: [“shoulder_pan”, “shoulder_lift”, “elbow_flex”, “wrist_flex”, “wrist_roll”, “gripper”]}
具身开源套件部分课程如下,欢迎联系合作采购(全套开源)

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐



 8
8 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)