
多模态扩散框架MDF:统一机器人策略/规划/异常检测,让机器人多模态操作更稳、更灵活,完美适配接触丰富的工业与服务机器人场景
歇根大学团队研发的Multimodal Diffusion Forcing (MDF):依靠“2D时间-模态噪声矩阵+点云扩散自编码器+统一扩散转换器”,一个模型搞定策略生成、规划、动力学建模、异常检测四大功能,模拟任务成功率达 100%,真实汽车机油盖安装 / 拆卸任务成功率超 3D Diffusion Policy(DP3)26%,噪声环境下鲁棒性提升 70%,让机器人多模态操作更稳、更灵活,
摘要:多模态扩散框架MDF:统一机器人策略/规划/异常检测,模拟任务成功率达100%,真实场景超DP3 26%,噪声下鲁棒性领先70%。
导语
在做机器人接触操作、工业维护和智能操控时存在着这种困扰:机器人拧螺母、插销、装机油盖时,要整合视觉、力、本体感觉等多模态数据,却因模态协同差导致动作失误;环境有噪声时(比如点云缺失)就性能暴跌;要实现策略、异常检测、动力学建模,得装多个模型,部署繁琐还占资源?
这背后是接触丰富操作的核心痛点:多模态协同难、噪声敏感、功能单一、部署复杂。
密歇根大学团队研发的Multimodal Diffusion Forcing (MDF)《Unified Multimodal Diffusion Forcing for Forceful Manipulation》:依靠“2D时间-模态噪声矩阵+点云扩散自编码器+统一扩散转换器”,一个模型搞定策略生成、规划、动力学建模、异常检测四大功能,模拟任务成功率达 100%,真实汽车机油盖安装 / 拆卸任务成功率超 3D Diffusion Policy(DP3)26%,噪声环境下鲁棒性提升 70%,让机器人多模态操作更稳、更灵活,完美适配接触丰富的工业与服务机器人场景。
一、接触丰富操作的 “四大痛点”:现有方法顶不住
机器人做拧螺母、插销、装拆零件等接触丰富的任务,传统方法始终绕不开四个核心问题:
1. 多模态协同难:数据互补用不好
视觉(点云)、力信号、本体感觉、动作等多模态数据存在复杂的时空关联(比如力反馈指导视觉对齐),但传统方法要么只用单一模态,要么简单拼接,没法捕捉模态间的深层依赖,导致操作精度低(比如拧螺母错位、插销卡住)。
2. 噪声敏感:真实场景易失效
工业环境中,相机可能被遮挡、点云有缺失、力信号有干扰,传统模型对这些噪声耐受度低,比如点云损坏后后成功率暴跌 18%,根本没法落地。
3. 功能单一:多个模型难部署
要实现动作生成(策略)、轨迹规划、异常检测(比如零件卡住、传感器故障),得训练多个专用模型,不仅训练成本高,部署时还需协调多个模块,响应慢且易出错。
4. 输入输出固定:适配性差
不同任务需要不同的历史长度、输入模态(比如有的机器人没力传感器),传统模型输入输出结构固定,改任务就要改模型,灵活性极差。
二、核心思路:MDF 的 “三大核心设计”,统一多模态 + 多功能
MDF 的核心逻辑是 “2D 噪声矩阵打破模态 / 时间限制 + 统一架构捕捉深层关联 + 灵活推理适配多场景”,一个模型搞定接触丰富操作的全需求:
1. 设计一:2D 时间 - 模态噪声矩阵 —— 精细控制多模态协同
这是 MDF 的灵魂创新,彻底解决传统扩散模型 “全局噪声” 的局限,如图 2 所示:
-
核心逻辑:噪声不再是全局 scalar,而是 T(轨迹长度)×M(模态数)的矩阵,每个时间步、每个模态可独立设置噪声水平(0 = 保留信息,max = 完全掩码);
-
三大块配置:条件块(保留输入,如历史视觉 / 力数据)、目标块(待预测,如未来动作 / 状态)、丢弃块(忽略无关模态);
-
训练收益:强制模型学习模态间(如动作→力信号)、时间上(如过去→未来)的依赖,比如预测拧螺母时 “动作变化→力信号增强” 的关联。

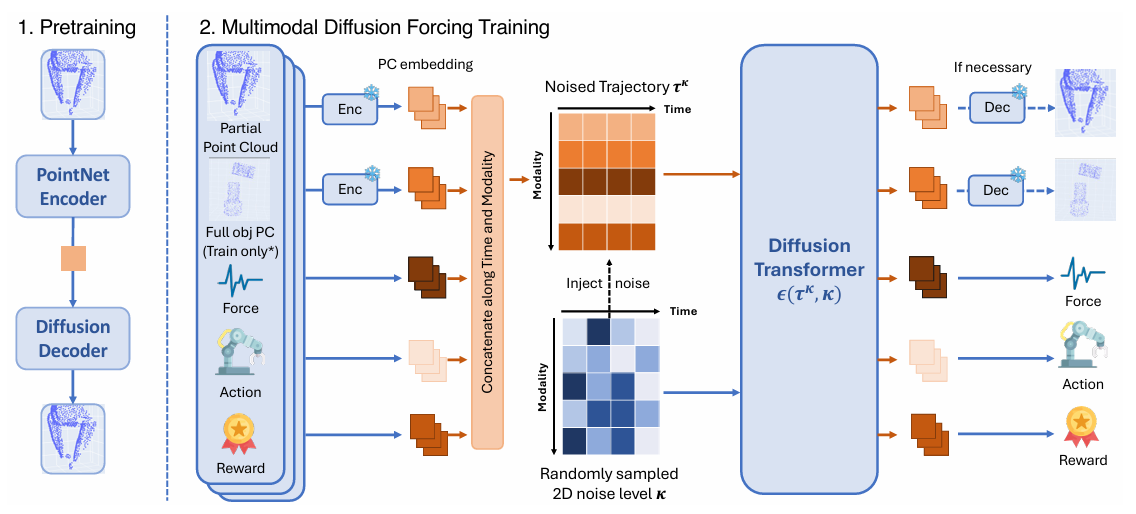
2. 设计二:双级架构 —— 点云 + 多模态的高效编码
针对接触操作依赖 3D 几何信息的特点,MDF 设计了 “点云自编码器 + 扩散 Transformer” 的双级架构,如图 3 所示:
-
点云预处理:先预训练扩散式点云自编码器,将高维无序点云(部分 / 完整)压缩为紧凑嵌入,解决点云建模难的问题;
-
多模态融合:将点云嵌入、力、动作、 proprioception、奖励等模态,按时间步拼接,再注入对应噪声水平嵌入,输入扩散 Transformer;
-
关键优势:Transformer 捕捉双向时序依赖和跨模态交互,且点云解码仅在训练时进行,推理时跳过,速度达 10Hz,满足实时需求。
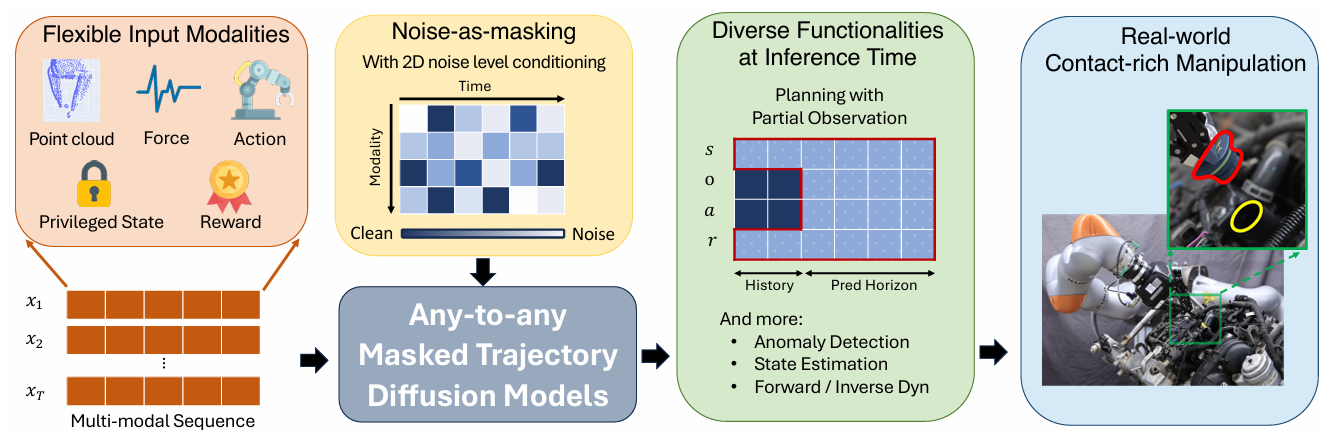
3. 设计三:灵活推理 —— 一个模型适配 N 种任务
通过配置 2D 噪声矩阵,MDF 不用改模型结构,就能实现 4 大核心功能,如图 1 所示:
-
策略生成:条件块 = 历史视觉 + 力 + proprioception,目标块 = 未来动作,适配拧螺母、插销等实时操作;
-
规划器:条件块 = 当前状态,目标块 = 未来动作 + 未来状态,支持长 horizon 任务;
-
异常检测:通过逐时间 - 模态扫查噪声注入,计算 KL 散度,精准定位异常(如点云故障→视觉模态、外力干扰→力模态);
-
动力学建模:条件块 = 当前状态 + 动作,目标块 = 未来状态(点云 + 力),支持 occlusion 推理(如拧螺母时遮挡的螺母状态预测)。
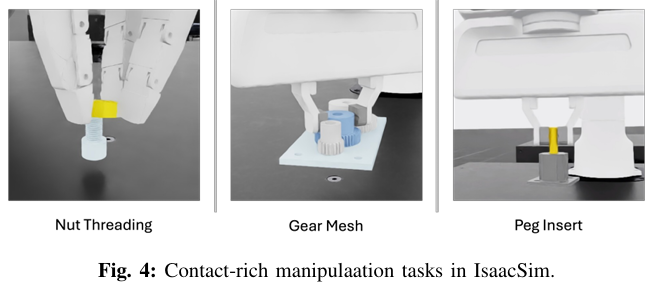
三、实验验证:模拟 + 真实任务双碾压,数据说话
团队在 3 个模拟接触任务(拧螺母、齿轮啮合、插销)和 2 个真实汽车维护任务(机油盖安装 / 拆卸)中做了全面测试,核心结果如下,关键数据如图 4、图 5、图 6 所示:
1. 模拟任务:成功率超基线,噪声下鲁棒性领先
1)测试设置:
对比 3D Diffusion Policy(DP3)、Unified World Model(UWM),模型输入含部分点云、力、动作等多模态数据;
2)核心结果:
-
成功率:MDF-Policy 在拧螺母任务达 100%,超 DP3(96%),齿轮啮合 86%、插销 80%,均领先所有基线;
-
噪声鲁棒性:点云注入噪声后,MDF-Policy 仅下降 2%-4%,而 DP3 暴跌 12%-18%;
-
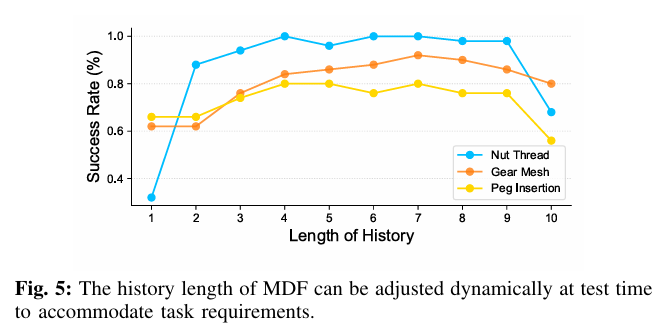
灵活适配:历史长度可动态调整,齿轮啮合任务历史长度 6 时成功率达 92%,远超固定长度的基线。
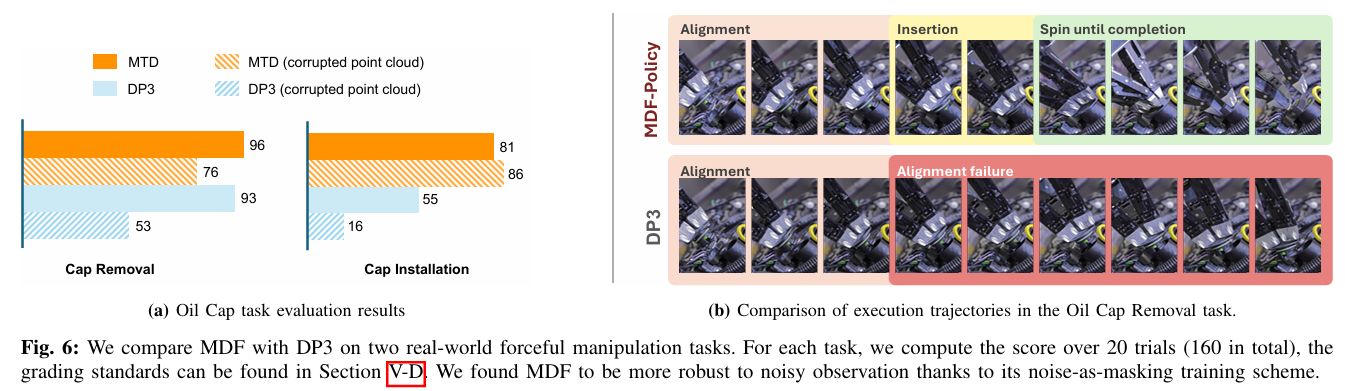
2. 真实任务:汽车维护成功率超 DP3 26%,噪声下稳如老狗
1)测试任务:
KUKA 机械臂完成机油盖安装(对齐→插入→锁紧)、拆卸(对齐→抓取→旋转→取出);
2)核心结果:
-
成功率:MDF 安装任务成功率超 DP3 26%,拆卸任务超 23%,DP3 常出现 “提前松握、锁紧不到位” 的问题;
-
噪声耐受:使用低质量点云(孔洞多、噪声大)时,MDF 拆卸任务成功率仍达 86%,而 DP3 仅 16%,差距达 70%;
-
定性效果:MDF 能精准对齐机油口、平稳旋转锁紧,而 DP3 在噪声点云下出现对齐偏差、动作卡顿。
3. 异常检测:精准定位时间 + 模态,精度超 ImDiffusion
1)测试场景:
点云注入随机点、力信号加噪声模拟异常;
2)核心结果:
MDF 扫查法(逐时间 - 模态检测)在力模态时间 - 模态定位精度达 66.0%,点云达 77.7%,远超 ImDiffusion(仅 3.52%-5.47%),能精准判断 “哪个时间、哪个传感器出问题”。
四、核心价值:一个模型顶 N 个,接触操作落地加速器
1. 三大核心优势,碾压传统方案
| 对比维度 | 传统方案(多个专用模型) | MDF 统一框架 |
|
多模态协同 |
简单拼接,依赖手工设计融合策略 |
自动学习时空关联,适配接触操作的模态互补需求 |
|
噪声鲁棒性 |
敏感,噪声下成功率暴跌 12%-18% |
耐受度高,噪声下仅下降 2%-4% |
|
功能覆盖 |
需策略、规划、异常检测多个模型,部署复杂 |
一个模型搞定 4 大功能,无需多模块协调 |
|
适配灵活性 |
输入输出固定,改任务需改模型 |
动态调整历史长度、模态组合,零代码适配新任务 |
2. 适用场景:哪里需要接触操作,哪里就用它
-
工业装配:拧螺母、齿轮啮合、插销等接触丰富的流水线任务;
-
汽车维护:机油盖、滤芯等部件的自动拆装;
-
服务机器人:家具组装、工具使用等需要力 - 视觉协同的任务;
-
故障诊断:机器人操作中的传感器异常、外部干扰检测。
3. 未来可改进方向
-
训练效率优化:针对核心任务聚焦关键模态 / 时间步,减少训练成本;
-
异质数据集扩展:融合不同模态组合的数据集,进一步提升泛化性;
-
长 horizon 任务强化:优化规划功能,适配更复杂的多步骤接触操作。
五、结语:接触丰富操作,终于有了 “统一解决方案”
MDF 的本质是 “用 2D 噪声矩阵打破模态与时间的限制,让一个模型学会接触操作的所有核心能力”—— 它不用多个模型拼接,不用手工设计模态融合,不用怕环境噪声,一个框架就能搞定从实时动作生成到异常检测的全流程,完美适配真实工业和服务场景的需求。
未来,随着训练效率的提升和数据集的扩展,MDF 会在更复杂的接触操作(如精密装配、柔性物体操作)中发挥更大作用,让机器人的接触操作从 “实验室可行” 真正走向 “工业落地稳”。对于需要快速落地接触丰富操作的研发团队来说,这无疑是一个 “减少重复开发、提升鲁棒性” 的利器!
END

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐
 22
22 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)