
机器人表征与人类对齐:从ROS基础到具身智能大模型
本文探讨机器人领域中人机意图对齐的核心问题,提出FERL框架实现表征对齐。通过三个算法步骤:学习人类认知特征、在特征空间学习权重、动态扩展特征空间,构建了从人类意图到机器人执行的桥梁。同时指出具身智能大模型作为物理交互系统的发展方向,为解决人机交互难题提供了新思路。
·
引言
在机器人领域中,始终存在一个核心难题:如何让机器人理解人类意图,并将其转化为自己的动作?这个问题贯穿了机器人发展的各个阶段——从早期的示教再现,到经典的ROS控制框架,再到今天的具身智能大模型。无论技术如何演进,"对齐"(Alignment)始终是连接"人类意图"与"机器人执行"的关键桥梁。
1 核心概念:什么是人机表征对齐?
“表征”指的是人类或者机器人对外部环境的一种描述或者一种表达方式。
“人机对齐”指的是机器人和人类一样,将人类意图映射到机器人能够理解和执行的表征上。
2 FERL框架(基于特征扩展的奖励学习)
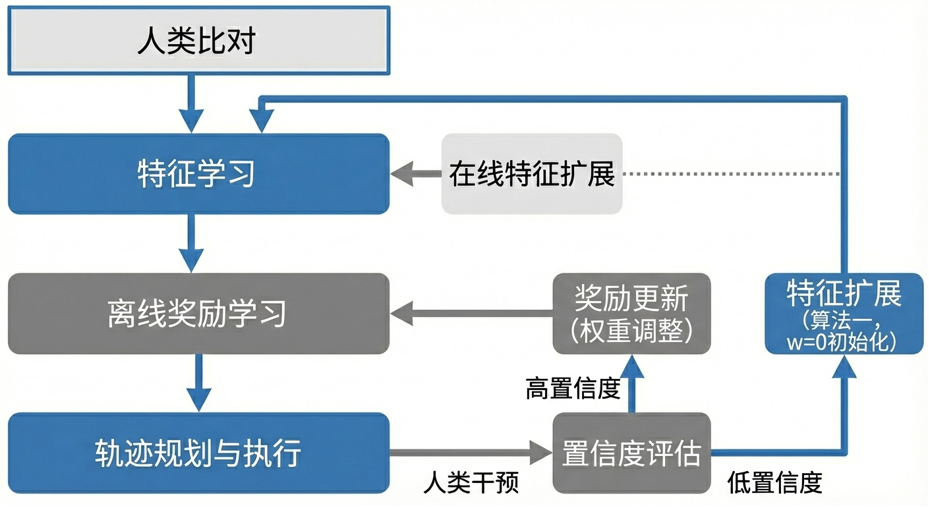
FERL关键思想:不直接对齐行为,而是先对齐“人类如何理解世界”。
算法一:表征对齐 学习人类认知的状态特征 φψ(s)
算法二:离线奖励学习 在对齐特征空间中学习权重 θ
算法三:在线特征扩展 当奖励无法解释人类行为时,扩展特征空间
3 具身智能大模型
具身智能(Embodied AI)是指具有物理身体的智能系统,能够通过感知和行动与环境进行交互。
(后续更新中……)

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐
 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)