
【AI技能】跟着费曼学具身智能
先问一个问题:什么是"具身智能"?简单说,就是让AI有身体,能在真实世界里做事情。不是光在那儿"想",而是真的能感知、能行动。你可能觉得这不就是机器人吗?对,但不完全对。传统机器人是写好规则让它动,具身智能是让AI自己学——像人一样,从经验里摸索。这个方向现在火得不行。光会说话不够,得能做事。所以各路玩家都在往这个方向冲:特斯拉的Optimus、Figure、1X……但问题来了——这个东西太容易学
😏★,°:.☆( ̄▽ ̄)/$:.°★ 😏
探智求真,学以致用。
欢迎来到我的博客,一起学习,共同进步。
喜欢的朋友可以关注一下,下次更新不迷路🥞
😏1. 概述
先问自己一个问题:什么是"具身智能"?
简单说,就是让AI有身体,能在真实世界里做事情。不是光在那儿"想",而是真的能感知、能行动。
你可能觉得这不就是机器人吗?对,但不完全对。传统机器人是写好规则让它动,具身智能是让AI自己学——像人一样,从经验里摸索。
这个方向现在火得不行。大模型火了一阵之后,大家发现:光会说话不够,得能做事。 所以各路玩家都在往这个方向冲:特斯拉的Optimus、Figure、1X……
但问题来了——这个东西太容易学偏了。
学具身智能的人有两种:
一种天天追论文,追热点,Transformer改个参数就发一篇
另一种真的动手做,让机器人在地上跑,在桌上抓东西
费曼会站在哪一边? 毫无疑问,第二种。
😊2. 从费曼的三句话说起
第一句:“我无法创造的东西,我就没有真正理解。”
费曼这句话本来是说物理的,但用在具身智能上简直完美。
你以为你看懂了那篇Policy Composition的论文?你去实现一遍试试。
你会发现:
- 论文里的"sim-to-real gap"就那么两行字,但你真正调的时候,发现仿真和真实差了十万八千里
- 作者说"效果很好",结果你跑出来发现机器人连个杯子都抓不稳
光看不练,等于没学。
第二句:“知道一个东西的名字,和真正了解它,是两回事。”
具身智能里充斥着各种听起来很厉害的名词:
- “基于多模态大模型的视觉-语言-动作策略”
- “层级式运动规划与控制”
- “自监督技能发现”
你可能把这些词背下来了,但费曼会问你:你能在黑板上推一遍这个公式吗?你能让一个没学过机器人的人听懂吗?(太真实了emm)
如果不能,那你只是知道名字,不是理解。
第三句:“物理是关于世界上发生的事情,不是关于公式。”
具身智能的核心矛盾就在这句话里。
很多研究者在做的事情:设计一个更复杂的网络架构,在仿真环境里刷更高的分数。
但机器人真正需要的是:真实世界里的稳定、鲁棒、能用。
这两个东西,差距大得离谱。
😊3. 用费曼的方式学具身智能
第一步:先玩,别急着看论文
费曼学物理,从来不是从公式开始的。他会先"放电影":这个东西会怎么动?
学具身智能也一样。你先去网上买一个便宜的机械臂,几百块的那种,或者下个CoppeliaSim/MuJoCo自己搭个仿真环境。让那个虚拟机器人在桌上动一动,抓个
东西。
你会有一个问题冒出来:它怎么知道该往哪动?
好,你带着问题去看理论,比你抱着论文死磕强十倍。
第二步:找类比,建直觉
费曼最厉害的地方,就是能用简单的类比把复杂的东西讲清楚。
具身智能的核心问题,也可以用类比理解:
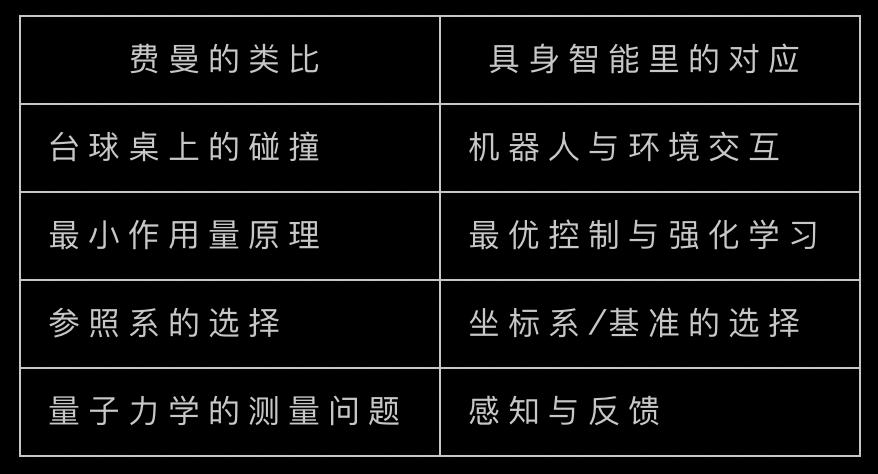
当你发现一个类比用不上的时候,恭喜你——你发现了一个真正的问题,而不是一个术语。
第三步:简化,再简化
费曼讲物理,每次都从最简单的例子开始。他不会上来就讲整个电磁学,他先讲一个电子在电场里怎么动。
具身智能也可以这样:
不要一上来就想让机器人"整理房间"。你先让它学会"把一个方块放到指定位置"。
不要一上来就用大模型。你先跑通一个最基础的PD控制器,看看关节能不能动起来。
从简单到复杂,这是唯一的路。
第四步:动手犯错
费曼在酒吧里研究量子电动力学,他在赌城破解老虎机。别人觉得他是在玩,其实他是在用实验验证自己的想法。
学具身智能也一样:
你会发现激光传感器有噪声
你会发现轮子会打滑
你会发现定位莫名其妙就漂移了
你会发现仿真里好好的策略,一到真机上就挂了
这些"失败"才是你真正学到东西的时刻。
😊4. 费曼思维在具身智能研究中的应用
问题1:感知 vs 理解
机器人"看到"一个杯子,和"理解"一个杯子,是两回事。
现在的视觉模型能认出杯子的像素,但它不知道杯子会滚、会翻、装水会洒。
费曼会说:这个"杯子"在它的表征里,到底是做什么的?
问题2:仿真 vs 真实
这是具身智能最大的坑。
在仿真器里,物理参数是精确设定的:
- 摩擦系数:0.5
- 质量:0.2kg
- 重力:9.8
在真实世界里,这些参数是未知的、会变化的、充满噪声的。
你训练的"策略",在仿真里是完美曲线,在真实世界里是跌跌撞撞。
费曼会说:你的模型只是在拟合一个它从未见过的世界——就像你在一张假地图上找路。
问题3:数据驱动的边界
现在大家都在说"大数据训练"。费曼会问:这些数据是从真实世界里来的吗?还是从另一个模型生成的?
用合成数据训练的真实机器人策略,有一个经典问题:崩溃在分布外(out-of-distribution)。
你用10万条仿真数据训练的抓取策略,换一个没见过的物体就失效了。
因为它学到的不是"怎么抓",而是"怎么抓训练集里的那些东西"。
😆5. 写给想学具身智能的你
机器人这个领域有个特点:硬件和软件必须一起调。
就像你不能只看说明书就学会骑自行车——你得真的去骑,摔几次,才知道平衡感怎么找。
很多人学了一堆算法公式,觉得自己会了。拿到一个真实机器人,发现:
- 激光数据有噪声
- 轮子打滑
- 定位突然漂移
- 触觉传感器的数据飘得离谱
这才是真正的问题。
费曼说过:“Science is the belief in the ignorance of experts.” 科学,是相信专家的无知。
在具身智能里,这个道理同样适用——不要迷信论文里的SOTA,相信你亲手跑出来的东西。
所以学习具身智能最好的方式——去调一个真实的机器人。让它在桌子上抓东西,碰到问题了再回头看理论。
以上。

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐


 8
8 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)