
基于高通跃龙IQ-9100打造具身智能机器人视觉SLAM与自主导航系统(2): Nav2导航栈与NPU动态避障
本文摘要: 本文深入配置了Nav2导航栈,针对IQ-9100室内机器人优化了AMCL定位、MPPI控制器和SmacPlanner规划器等核心组件参数。配置重点包括:AMCL粒子滤波参数优化,MPPI控制器的多目标评价体系(包含9种critics),以及SmacPlanner混合A*算法的路径规划参数。通过动态障碍物检测与轨迹预测注入代价地图,实现了具有预见性的动态避障能力。配置参数覆盖了从定位精度
前言
上篇我们搭建了系统整体架构,选用了Cartographer激光SLAM为主建图方案,并通过EKF融合了轮式里程计、视觉里程计和IMU,为导航提供了稳定可靠的定位信息。本篇将在此基础之上,深入配置Nav2导航栈,包括AMCL定位、MPPI控制器、SmacPlanner规划器以及行为树。同时,利用IQ-9100的NPU加速实现动态障碍物检测与轨迹预测,并将其注入代价地图,实现具有预见性的动态避障能力。
1. Nav2 导航栈深度配置
Nav2导航栈整体架构与数据流: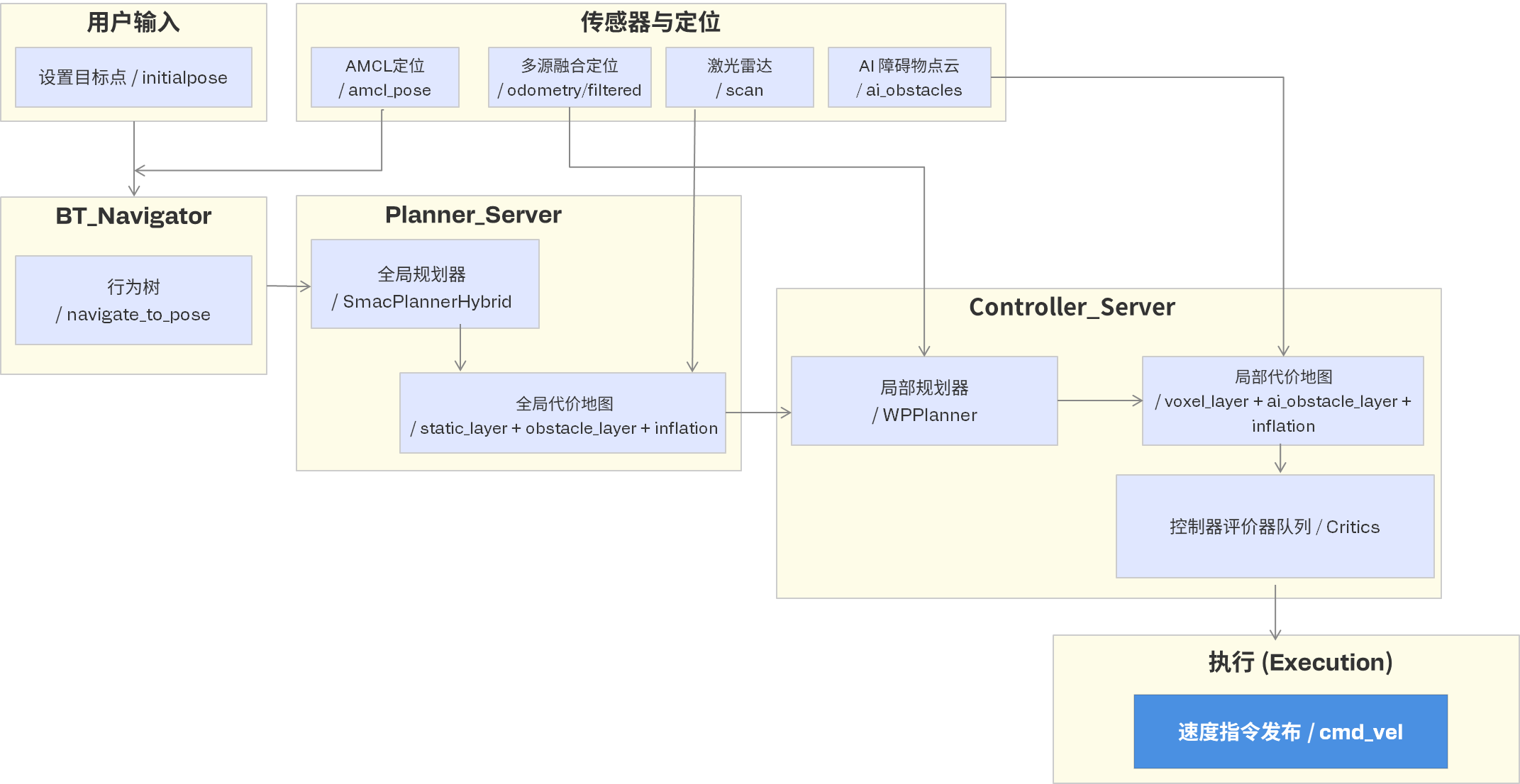
图中展示了Nav2导航栈的核心模块及其数据交互关系,整体可分为六个层次:
- 用户输入:通过RVIZ或API设置目标点(
/initialpose),触发导航任务。 - 行为树(BT Navigator):负责任务编排,如
navigate_to_pose,管理正常流程与异常恢复。 - 全局规划层(Planner Server):
- 使用
SmacPlannerHybrid规划全局路径。 - 依赖全局代价地图(静态层+障碍物层+膨胀层),该地图基于激光雷达
/scan构建。
- 使用
- 局部规划与控制层(Controller Server):
- 核心是
MPPIController,通过一组Critics(评估器) 对候选轨迹打分。 - 使用局部代价地图(体素层+AI障碍物层+膨胀层),其中AI障碍物点云
/ai_obstacles来自NPU检测节点。
- 核心是
- 传感器与定位:
AMCL提供全局定位/amcl_pose,robot_localization的EKF输出融合里程计/odometry/filtered。- 激光雷达和AI障碍物分别喂给全局/局部代价地图。
- 执行层:最终输出速度指令
/cmd_vel给机器人底盘。
一句话总结:用户目标经行为树调度,由全局规划器生成路径,局部控制器结合实时传感器与动态障碍物信息,输出平滑的控制指令。
1.1 Nav2 参数配置
# config/nav2_params.yaml
# Nav2 导航栈完整配置 (针对IQ-9100室内机器人优化)
amcl:
ros__parameters:
alpha1: 0.2
alpha2: 0.2
alpha3: 0.2
alpha4: 0.2
alpha5: 0.2
base_frame_id: "base_link"
beam_skip_distance: 0.5
beam_skip_error_threshold: 0.9
beam_skip_threshold: 0.3
do_beams_skip: false
global_frame_id: "map"
lambda_short: 0.1
laser_likelihood_max_dist: 2.0
laser_max_range: 12.0
laser_min_range: 0.2
laser_model_type: "likelihood_field"
max_beams: 60
max_particles: 2000
min_particles: 500
odom_frame_id: "odom"
pf_err: 0.05
pf_z: 0.99
recovery_alpha_fast: 0.1
recovery_alpha_slow: 0.001
resample_interval: 1
robot_model_type: "nav2_amcl::DifferentialMotionModel"
save_pose_rate: 0.5
sigma_hit: 0.2
tf_broadcast: true
transform_tolerance: 1.0
update_min_a: 0.2
update_min_d: 0.25
z_hit: 0.5
z_max: 0.05
z_rand: 0.5
z_short: 0.05
scan_topic: scan
bt_navigator:
ros__parameters:
global_frame: map
robot_base_frame: base_link
odom_topic: /odometry/filtered
bt_loop_duration: 10
default_server_timeout: 20
navigators: ["navigate_to_pose", "navigate_through_poses"]
navigate_to_pose:
plugin: "nav2_bt_navigator::NavigateToPoseNavigator"
navigate_through_poses:
plugin: "nav2_bt_navigator::NavigateThroughPosesNavigator"
error_code_names:
- compute_path_error_code
- follow_path_error_code
controller_server:
ros__parameters:
controller_frequency: 20.0
min_x_velocity_threshold: 0.001
min_y_velocity_threshold: 0.5
min_theta_velocity_threshold: 0.001
progress_checker_plugins: ["progress_checker"]
goal_checker_plugins: ["general_goal_checker"]
controller_plugins: ["FollowPath"]
progress_checker:
plugin: "nav2_controller::SimpleProgressChecker"
required_movement_radius: 0.5
movement_time_allowance: 10.0
general_goal_checker:
plugin: "nav2_controller::SimpleGoalChecker"
stateful: true
xy_goal_tolerance: 0.15
yaw_goal_tolerance: 0.1
FollowPath:
plugin: "nav2_mppi_controller::MPPIController"
time_steps: 56
model_dt: 0.05
batch_size: 2000
vx_std: 0.2
vy_std: 0.0
wz_std: 0.4
vx_max: 0.8
vx_min: -0.35
vy_max: 0.0
wz_max: 1.5
iteration_count: 1
prune_distance: 1.7
transform_tolerance: 0.1
temperature: 0.3
gamma: 0.015
motion_model: "DiffDrive"
visualize: true
retry_attempt_limit: 1
critics: [
"ConstraintCritic", "CostCritic", "GoalCritic",
"GoalAngleCritic", "PathAlignCritic", "PathFollowCritic",
"PathAngleCritic", "PreferForwardCritic", "ObstaclesCritic"
]
ConstraintCritic:
enabled: true
cost_weight: 4.0
cost_power: 1
GoalCritic:
enabled: true
cost_weight: 5.0
cost_power: 1
threshold_to_consider: 1.4
GoalAngleCritic:
enabled: true
cost_weight: 3.0
cost_power: 1
threshold_to_consider: 0.5
ObstaclesCritic:
enabled: true
cost_weight: 1.0
consider_footprint: true
collision_margin_distance: 0.1
near_goal_distance: 0.5
CostCritic:
enabled: true
cost_weight: 3.0
cost_power: 1
critical_cost: 300.0
PathAlignCritic:
enabled: true
cost_weight: 14.0
cost_power: 1
max_path_occupancy_ratio: 0.05
threshold_to_consider: 0.5
PathFollowCritic:
enabled: true
cost_weight: 5.0
offset_from_furthest: 5
threshold_to_consider: 1.4
PreferForwardCritic:
enabled: true
cost_weight: 5.0
cost_power: 1
threshold_to_consider: 0.5
planner_server:
ros__parameters:
expected_planner_frequency: 10.0
planner_plugins: ["GridBased"]
GridBased:
plugin: "nav2_smac_planner::SmacPlannerHybrid"
tolerance: 0.25
downsampling_factor: 1
allow_unknown: true
max_iterations: 1000000
max_on_approach_iterations: 1000
max_planning_time: 2.0
motion_model_for_search: "DUBIN"
angle_quantization_bins: 72
analytic_expansion_ratio: 3.5
analytic_expansion_max_length: 3.0
minimum_turning_radius: 0.20
cost_travel_multiplier: 2.0
cost_penalty: 2.0
lookup_table_size: 20.0
cache_obstacle_heuristic: false
smooth_path: true
local_costmap:
local_costmap:
ros__parameters:
update_frequency: 10.0
publish_frequency: 5.0
global_frame: odom
robot_base_frame: base_link
rolling_window: true
width: 5
height: 5
resolution: 0.05
robot_radius: 0.25
plugins: ["voxel_layer", "ai_obstacle_layer", "inflation_layer"]
voxel_layer:
plugin: "nav2_costmap_2d::VoxelLayer"
enabled: true
publish_voxel_map: false
origin_z: 0.0
z_resolution: 0.05
z_voxels: 16
max_obstacle_height: 2.0
mark_threshold: 0
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: true
marking: true
data_type: "LaserScan"
raytrace_max_range: 12.0
raytrace_min_range: 0.2
obstacle_max_range: 10.0
obstacle_min_range: 0.2
ai_obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: true
observation_sources: ai_obstacles
ai_obstacles:
topic: /ai_obstacles
data_type: "PointCloud2"
marking: true
clearing: false
max_obstacle_height: 2.0
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.55
global_costmap:
global_costmap:
ros__parameters:
update_frequency: 2.0
publish_frequency: 1.0
global_frame: map
robot_base_frame: base_link
robot_radius: 0.25
resolution: 0.05
track_unknown_space: true
plugins: ["static_layer", "obstacle_layer", "inflation_layer"]
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: true
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: true
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: true
marking: true
data_type: "LaserScan"
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.55
其中,MPPI(Model Predictive Path Integral)控制器Critics评估器组成如图,帮助理解每个Critic的作用。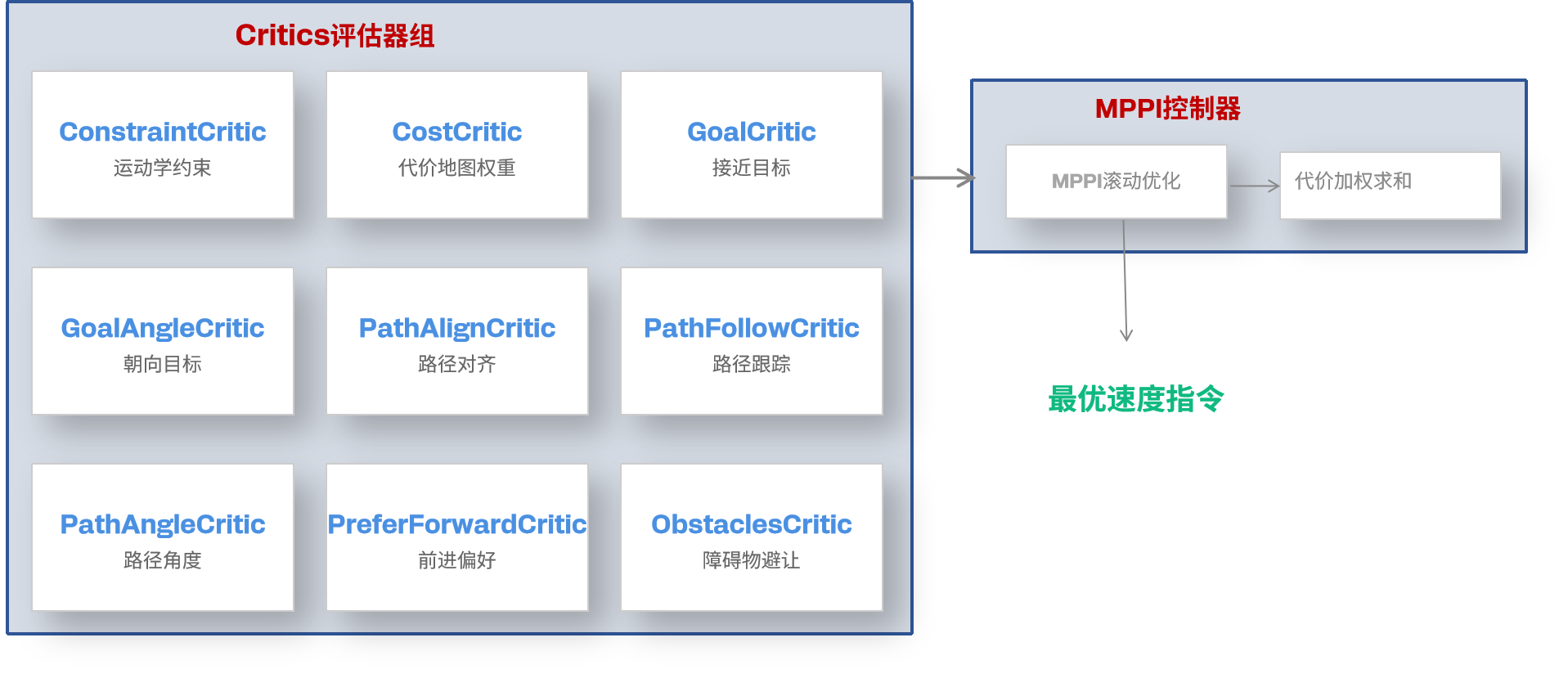
MPPI控制器通过随机采样多条轨迹,并使用一组Critics(评估器) 对每条轨迹进行代价评分,最终选出综合代价最低的轨迹执行。
图中9个Critics分为三类:
-
运动学与安全性:
ConstraintCritic:检查运动学约束(速度、加速度是否超出限制)。ObstaclesCritic:评估与障碍物的碰撞风险,设置安全边距。CostCritic:综合代价地图的代价值(如接近膨胀层区域扣分)。
-
路径跟踪与对齐:
PathAlignCritic:鼓励轨迹与全局路径对齐。PathFollowCritic:惩罚偏离路径的行为。PathAngleCritic:检查轨迹朝向是否与路径角度一致。
-
目标达成与前进偏好:
GoalCritic:奖励接近目标的轨迹。GoalAngleCritic:确保接近目标时朝向正确。PreferForwardCritic:鼓励前进而非原地旋转或倒车。
一句话总结:MPPI控制器将安全、路径跟踪、目标趋近等约束转化为量化代价,综合加权后选出最平滑、安全且高效的局部轨迹。
1.2 NPU加速的动态障碍物检测节点
传统代价地图只处理静态/准静态障碍物,但真实环境中行人、推车等动态目标需要AI理解。 下面是NPU动态障碍物检测与预测节点处理流程:
# navigation/dynamic_obstacle_node.py
# NPU加速的动态障碍物检测与轨迹预测
# 发布到Nav2代价地图的AI障碍物层
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import Image, PointCloud2, PointField
from vision_msgs.msg import Detection2DArray
from geometry_msgs.msg import Point
from std_msgs.msg import Header
from cv_bridge import CvBridge
import numpy as np
import struct
import time
import math
from collections import deque
from dataclasses import dataclass, field
from typing import Dict, List, Tuple
@dataclass
class DynamicObject:
"""动态障碍物跟踪状态"""
obj_id: int
label: str
position: np.ndarray # [x, y] in base_link
velocity: np.ndarray # [vx, vy] 估计速度
positions_history: deque
last_seen: float
predicted_path: List[np.ndarray] = field(default_factory=list)
class DynamicObstacleNode(Node):
"""
动态障碍物检测 + 轨迹预测 → 注入代价地图
利用NPU检测人/车/推车等动态物体,预测其未来2秒轨迹,在代价地图中标记预测区域
"""
DYNAMIC_CLASSES = {0: "person", 1: "bicycle", 2: "car", 3: "motorcycle", 5: "bus", 7: "truck"}
def __init__(self):
super().__init__('dynamic_obstacle')
self.declare_parameter('prediction_horizon', 2.0)
self.declare_parameter('prediction_dt', 0.2)
self.declare_parameter('safety_radius_person', 0.5)
self.declare_parameter('safety_radius_vehicle', 1.0)
self.declare_parameter('focal_length', 500.0)
self.declare_parameter('camera_height', 0.3)
self.pred_horizon = self.get_parameter('prediction_horizon').value
self.pred_dt = self.get_parameter('prediction_dt').value
self._tracked_objects: Dict[int, DynamicObject] = {}
self._next_id = 0
self.create_subscription(Detection2DArray, '/cam0/detections', self._detection_callback, 10)
self.create_subscription(Detection2DArray, '/cam1/detections', self._detection_callback, 10)
self.obstacle_pub = self.create_publisher(PointCloud2, '/ai_obstacles', 10)
self.create_timer(0.1, self._prediction_loop) # 10Hz
self.get_logger().info('Dynamic obstacle node started')
def _detection_callback(self, msg: Detection2DArray):
"""处理AI检测结果,转为3D位置并更新跟踪"""
now = time.time()
focal = self.get_parameter('focal_length').value
cam_h = self.get_parameter('camera_height').value
for det in msg.detections:
if not det.results:
continue
class_id = int(det.results[0].hypothesis.class_id)
if class_id not in self.DYNAMIC_CLASSES:
continue
score = det.results[0].hypothesis.score
if score < 0.4:
continue
bbox_h = det.bbox.size_y
bbox_cx = det.bbox.center.position.x
bbox_bottom_y = det.bbox.center.position.y + bbox_h / 2
real_heights = {0: 1.7, 1: 1.0, 2: 1.5, 3: 1.0, 5: 3.0, 7: 3.0}
real_h = real_heights.get(class_id, 1.5)
depth = (real_h * focal) / max(bbox_h, 10)
depth = min(max(depth, 0.5), 10.0)
img_cx = 320.0
angle = math.atan2(bbox_cx - img_cx, focal)
x = depth * math.cos(angle)
y = depth * math.sin(angle)
pos = np.array([x, y])
self._update_tracking(pos, class_id, now)
def _update_tracking(self, position: np.ndarray, class_id: int, timestamp: float):
"""更新目标跟踪(最近邻匹配)"""
best_match = None
best_dist = 1.5
for oid, obj in self._tracked_objects.items():
dist = np.linalg.norm(position - obj.position)
if dist < best_dist:
best_dist = dist
best_match = oid
if best_match is not None:
obj = self._tracked_objects[best_match]
dt = timestamp - obj.last_seen
if dt > 0.01:
obj.velocity = 0.7 * obj.velocity + 0.3 * (position - obj.position) / dt
obj.position = position
obj.last_seen = timestamp
obj.positions_history.append(position.copy())
else:
self._tracked_objects[self._next_id] = DynamicObject(
obj_id=self._next_id,
label=self.DYNAMIC_CLASSES.get(class_id, "unknown"),
position=position,
velocity=np.zeros(2),
positions_history=deque([position.copy()], maxlen=30),
last_seen=timestamp,
)
self._next_id += 1
expired = [oid for oid, obj in self._tracked_objects.items() if timestamp - obj.last_seen > 2.0]
for oid in expired:
del self._tracked_objects[oid]
def _prediction_loop(self):
"""预测动态物体未来轨迹,发布为代价地图点云"""
if not self._tracked_objects:
return
obstacle_points = []
steps = int(self.pred_horizon / self.pred_dt)
for obj in self._tracked_objects.values():
speed = np.linalg.norm(obj.velocity)
if speed < 0.1:
obstacle_points.append((obj.position[0], obj.position[1], 0.0))
continue
obj.predicted_path = []
for t in range(steps):
dt = (t + 1) * self.pred_dt
pred_pos = obj.position + obj.velocity * dt
obj.predicted_path.append(pred_pos)
if obj.label == "person":
radius = self.get_parameter('safety_radius_person').value
else:
radius = self.get_parameter('safety_radius_vehicle').value
for angle in np.linspace(0, 2*math.pi, 8, endpoint=False):
px = pred_pos[0] + radius * math.cos(angle)
py = pred_pos[1] + radius * math.sin(angle)
obstacle_points.append((px, py, 0.0))
if obstacle_points:
cloud_msg = self._build_pointcloud(obstacle_points)
self.obstacle_pub.publish(cloud_msg)
def _build_pointcloud(self, points: list) -> PointCloud2:
"""构建PointCloud2消息"""
header = Header()
header.stamp = self.get_clock().now().to_msg()
header.frame_id = "base_link"
fields = [
PointField(name='x', offset=0, datatype=PointField.FLOAT32, count=1),
PointField(name='y', offset=4, datatype=PointField.FLOAT32, count=1),
PointField(name='z', offset=8, datatype=PointField.FLOAT32, count=1),
]
point_data = b''
for x, y, z in points:
point_data += struct.pack('fff', x, y, z)
msg = PointCloud2()
msg.header = header
msg.height = 1
msg.width = len(points)
msg.fields = fields
msg.is_bigendian = False
msg.point_step = 12
msg.row_step = 12 * len(points)
msg.data = point_data
msg.is_dense = True
return msg
def main(args=None):
rclpy.init(args=args)
node = DynamicObstacleNode()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
下篇预告
Nav2导航栈与NPU动态避障已经就绪,下一篇我们将进入真正的实战环节:使用Cartographer完成建图、启动完整导航系统、通过Nav2 SimpleCommander API实现单点导航和多点巡逻,并加入定位失效自动恢复策略,保障长期运行的鲁棒性。敬请关注!

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐

 5
5 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)