
[具身智能-687]:ROS2 tf2空间位置变换(Transform)库,机器人的 “空间神经网络”,负责维护万物之间的相对位置与运动关系。管理、分发、查询和计算多坐标系间位姿变换的核心库。
tf2 不仅仅是一个坐标转换工具,它是ROS2 系统的空间中枢物理忠实:完美映射了 **“万物皆相对,无绝对时空”** 的物理法则。系统骨架:将机器人的感知、定位、运动、规划四大模块通过相对坐标无缝连接。开发范式:强制开发者以相对视角思考问题,代码更模块化、更通用、更易移植。一句话总结:在 ROS2 的世界里,tf2 定义了空间;没有 tf2,机器人就没有空间感,所有数据都是孤立的数字。
tf2 (Transform Library 2) 是 ROS2 中用于管理、分发、查询和计算多坐标系间位姿变换的核心库。它是“物理世界相对性原理” 在软件层面的唯一、标准、分布式实现。
简单说:tf2 就是机器人的 “空间神经网络”,负责维护万物之间的相对位置与运动关系。
一、tf2 的核心定位与哲学
1. 核心使命
维护一个随时间变化的坐标变换树 (Transform Tree),并提供任意两坐标系间的实时 / 历史变换查询。
2. 底层哲学映射
- 物理本质 → tf2 设计
- 无绝对原点 → 坐标树是无根树(可任意选根),所有关系都是相对的。
- 相对位置 → 用父子节点(
parent_frame_id→child_frame_id)描述相对位姿。 - 相对运动 → 变换数据带时间戳,记录运动历史。
- 工程哲学
- 解耦:传感器、底盘、机械臂各自发布自己的 TF,互不干扰。
- 统一:所有模块(感知、定位、控制)共享同一张TF 坐标网。
- 分布式:TF 数据通过话题广播,全网可见。
二、核心概念与架构
1. 坐标变换树 (TF Tree)
- 结构:树形拓扑(非图)。任意两个坐标系之间有且仅有一条唯一路径(不能形成环)。
- 父节点 (Parent):基准坐标系。
- 子节点 (Child):被描述的坐标系。
- 变换 (Transform):描述子坐标系相对于父坐标系的位姿(平移 + 旋转)。
- 标准 ROS2 坐标系链
plaintext
map (全局地图)
↕ (map->odom: 由SLAM/定位提供)
odom (里程计)
↕ (odom->base_link: 由里程计/IMU提供)
base_link (机器人本体)
↕ (base_link->laser_link: 静态安装关系)
laser_link (雷达) / camera_link (相机) / ...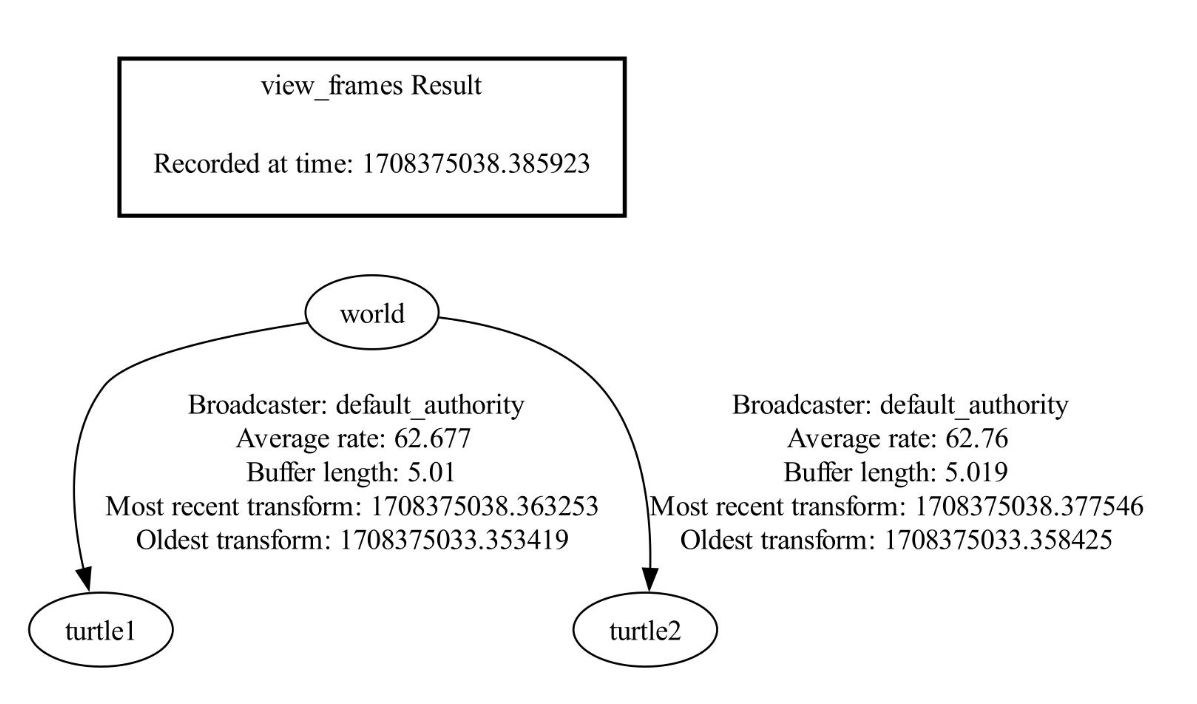
2. 核心数据类型:TransformStamped
描述带时间戳的坐标系关系,是 tf2 的最小数据单元。
cpp
运行
// 核心字段
std_msgs/Header header; // 时间戳 (stamp) + 父坐标系 (frame_id)
string child_frame_id; // 子坐标系ID
geometry_msgs/Transform transform; // 变换本身
- Vector3 translation; // 平移 (x, y, z)
- Quaternion rotation; // 旋转 (四元数, 避免欧拉角奇异点)
3. 两大核心话题
/tf(动态变换)- 发布随时间变化的位姿(如
odom→base_link、机械臂关节)。 - 高频发布(通常 10-100Hz)。
- 发布随时间变化的位姿(如
/tf_static(静态变换)- 发布永不改变 / 极少改变的位姿(如传感器安装位置
base_link→laser_link)。 - “latched” (锁存) 机制:只需发布 1 次,所有新节点都能收到历史数据,极大节省带宽。
- 发布永不改变 / 极少改变的位姿(如传感器安装位置
4. 四大核心组件 (tf2_ros)
(1) Broadcaster (广播器) —— 信息生产者
负责向 /tf 或 /tf_static 发布变换。
TransformBroadcaster:发布动态变换。StaticTransformBroadcaster:发布静态变换。- 常用工具:
ros2 run tf2_ros static_transform_publisher x y z yaw pitch roll parent child
- 常用工具:
(2) Buffer (缓存) —— 时空数据库
- 核心:
tf2_ros::Buffer。 - 功能:
- 接收所有
/tf和/tf_static数据,缓存历史(默认 10 秒)。 - 维护完整的坐标树。
- 提供插值与时间旅行查询(查询 3 秒前的位姿)。ROS
- 接收所有
(3) Listener (监听器) —— 信息订阅者
- 核心:
tf2_ros::TransformListener。 - 功能:自动订阅
/tf和/tf_static,并将数据填充进Buffer。
(4) Transformer (变换器) —— 计算引擎
- 内置于
Buffer中。 - 功能:
- 路径查找:在树中找到两点间的变换链(如
map→odom→base_link→laser)。 - 链式乘法:将链上所有变换矩阵相乘,得到最终结果。
- 异常处理:抛出变换不存在、时间过期、坐标系断裂等异常。
- 路径查找:在树中找到两点间的变换链(如
三、核心工作流程:发布 → 监听 → 查询
1. 发布 (Broadcasting)
传感器 / 底盘驱动节点计算出自身相对父坐标系的位姿,然后广播出去。
cpp
运行
// C++ 伪代码
tf2_ros::TransformBroadcaster tf_broadcaster;
geometry_msgs::msg::TransformStamped tf_msg;
// 设置数据
tf_msg.header.stamp = node->now();
tf_msg.header.frame_id = "base_link"; // 父:车体
tf_msg.child_frame_id = "laser_link"; // 子:雷达
tf_msg.transform.translation.x = 0.1; // 雷达在车体前方10cm
tf_msg.transform.rotation.w = 1.0; // 无旋转
// 发送
tf_broadcaster.sendTransform(tf_msg);
2. 监听与缓存 (Listening & Buffering)
应用节点(如导航)创建 Listener 和 Buffer,自动收集全网 TF 数据。
3. 查询与变换 (Lookup & Transform)
应用节点向 Buffer 查询:“把 A 坐标系下的点,转换到 B 坐标系下”。
cpp
运行
// C++ 伪代码:查询雷达相对地图的位姿
geometry_msgs::msg::TransformStamped transform;
try {
// 查询:从 "laser_link" 到 "map" 的变换
transform = tf_buffer->lookupTransform(
"map", // 目标坐标系
"laser_link", // 源坐标系
tf2::TimePointZero, // 最新时间
tf2::Duration(1.0) // 等待1秒超时
);
} catch (tf2::TransformException& ex) {
RCLCPP_ERROR(...);
}
四、tf2 的高级特性
1. 时间旅行 (Time Traveling)ROS
tf2 缓存历史变换,允许查询过去时刻的位姿关系。
- 用途:传感器数据延迟对齐(如雷达数据是 50ms 前的,需查询当时的车体姿态)。
2. 数据类型兼容 (Conversion)
通过模板函数 tf2::doTransform,可直接转换点、向量、位姿、点云等多种数据类型。
- 支持库:
tf2_geometry_msgs,tf2_sensor_msgs,tf2_eigen等。
3. 静态变换优化
- 静态变换只发一次,零网络开销。
- 通常由 URDF (机器人描述文件) 在启动时自动发布。
4. 分布式与鲁棒性
- 任何节点都可发布 TF,系统无单点故障。
- 支持多机器、多机器人协同,共享同一张 TF 树.
五、常用调试工具
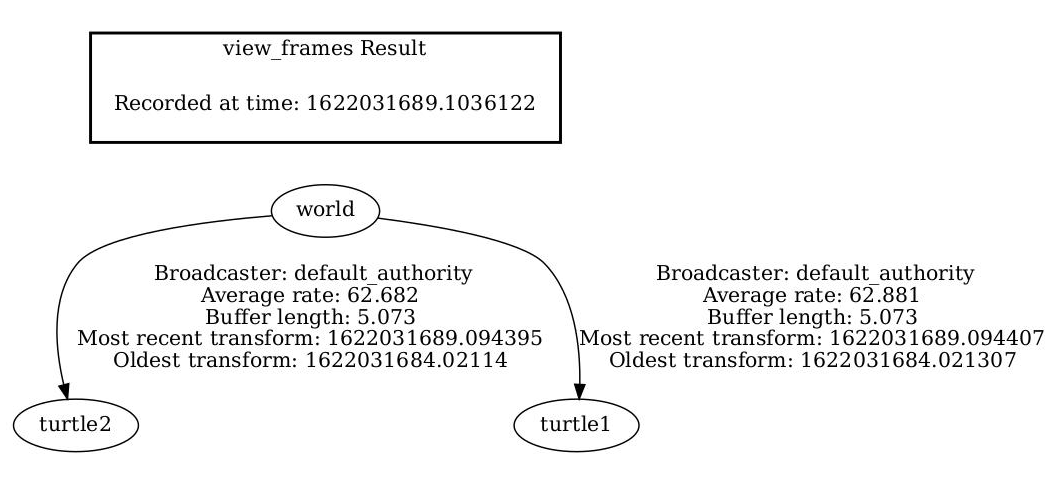
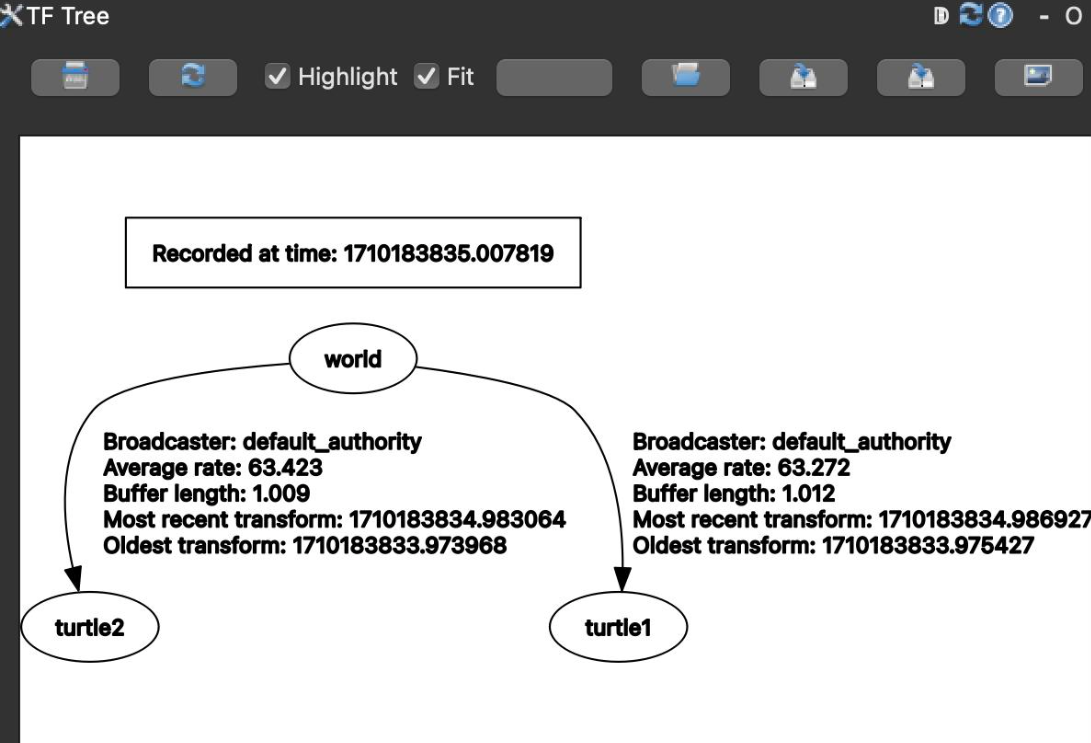
-
ros2 run tf2_tools view_frames- 生成 PDF,可视化当前完整的 TF 树结构、发布频率、延迟。
ros2 run tf2_ros tf2_echo <parent> <child>
- 实时打印两个坐标系间的平移、旋转、时间戳
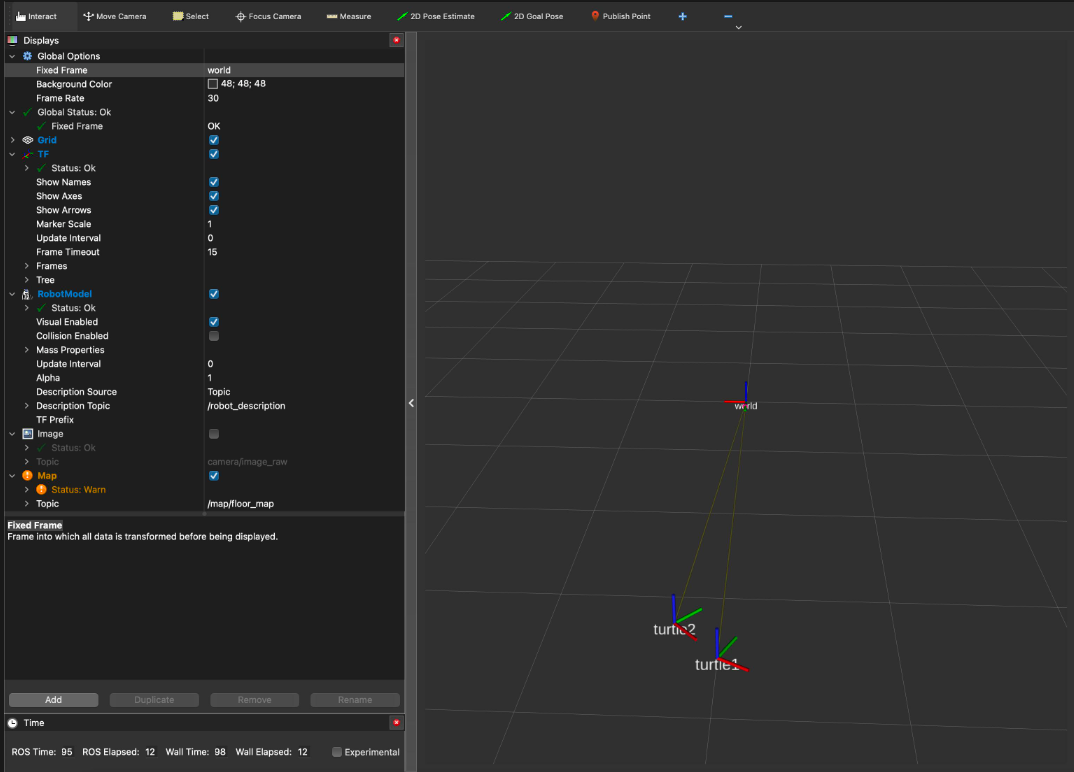
rviz2
- 可视化所有 TF 坐标系箭头,直观查看机器人姿态
六、总结:为什么 tf2 是机器人的基石?
tf2 不仅仅是一个坐标转换工具,它是 ROS2 系统的空间中枢:
- 物理忠实:完美映射了 **“万物皆相对,无绝对时空”** 的物理法则。
- 系统骨架:将机器人的感知、定位、运动、规划四大模块通过相对坐标无缝连接。
- 开发范式:强制开发者以相对视角思考问题,代码更模块化、更通用、更易移植。
一句话总结:
在 ROS2 的世界里,tf2 定义了空间;
没有 tf2,机器人就没有空间感,所有数据都是孤立的数字。

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐
 8
8 0
0- 0



 已为社区贡献201条内容
已为社区贡献201条内容

所有评论(0)