
传统机器人与具身智能时代:运动规划与运动控制区别
机器人运动规划与运动控制的本质区别
——从“照图施工”到“身随心动”
在机器人和人工智能领域,“运动规划”和“运动控制”是两个最核心,却也最容易被混淆的概念。尤其在具身智能浪潮到来之前,它们有着清晰的边界;而在今天,这个边界正在被重新定义。
一、传统机器人时代:运动规划——机器人的“大脑预演”
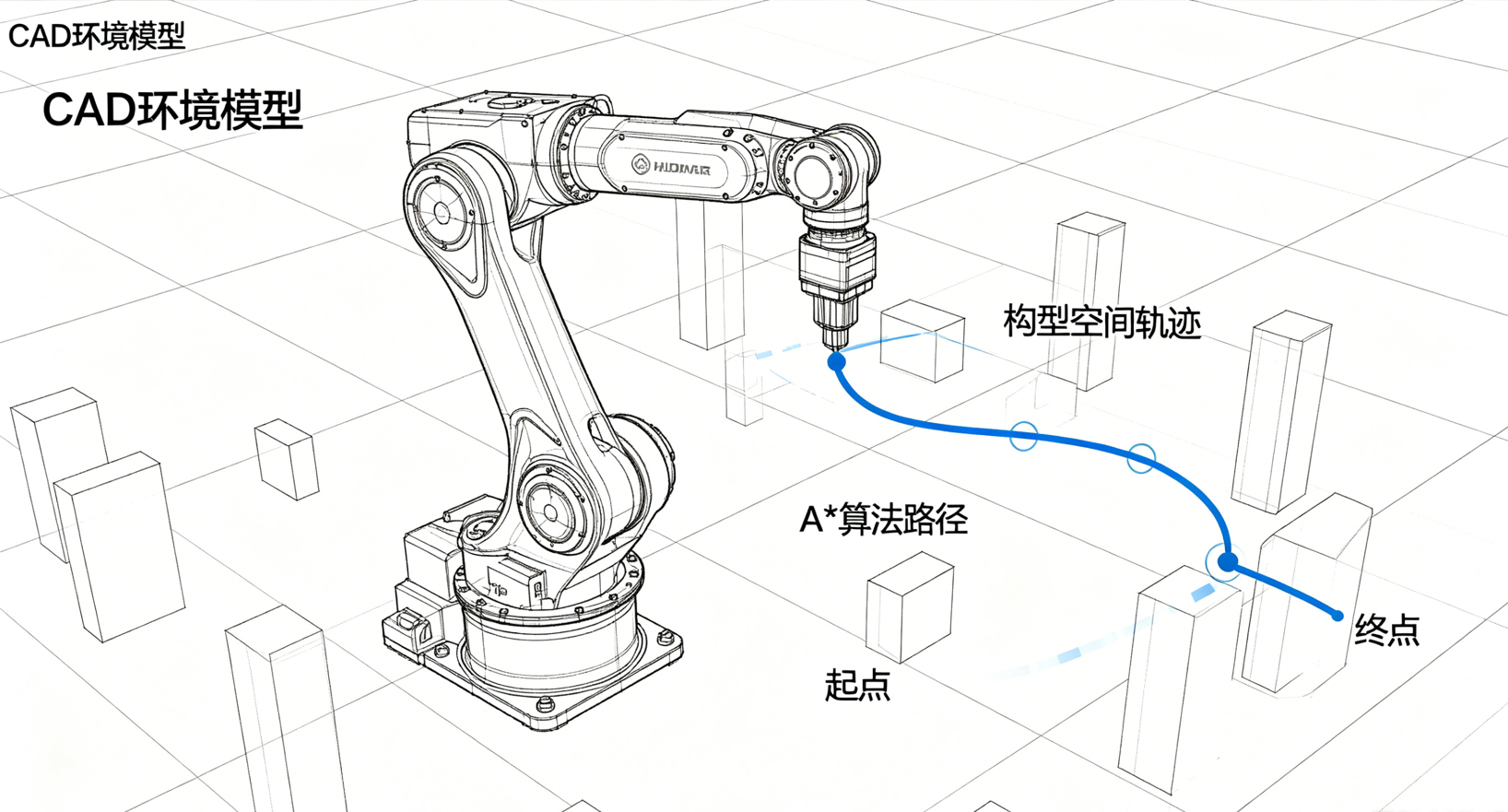
在传统机器人学中,运动规划被视为一个离线的、几何与路径层面的问题。
它的核心任务是:在静态、已知的环境中,找到一条从起点到终点的、无碰撞的几何路径。
想象一下,你想让一个机械臂把杯子从A点放到B点。运动规划模块会做这几件事:
1. 地图构建:利用环境模型(比如CAD图纸或3D点云),知道障碍物在哪里。
2. 路径搜索:运用算法(如A*、RRT、PRM)在构型空间(C-space)中寻找一条曲线。
3. 轨迹生成:在这条路径上加上时间属性,比如“第1秒走到这里,第2秒走到那里”,生成一条轨迹。
传统运动规划的关键特征:
- 假设前提:环境完全已知、静态不变;机器人是理想刚体,忽略其动力学复杂性。
- 输出结果:一条光滑的、无碰撞的轨迹(位置、速度、加速度随时间的变化)。
- 关注点:可达性和避障。它不关心机器人实际走不走得准,只关心“理论上”有没有路。
二、传统机器人时代:运动控制——机器人的“肢体执行”
如果说规划是导演,那控制就是演员。运动控制的核心任务是:让机器人的物理实体,去精确复现规划模块生成的那条理想轨迹。
控制面临的是真实世界的物理问题:摩擦力、惯性、负载变化、齿轮间隙、电机延迟等。
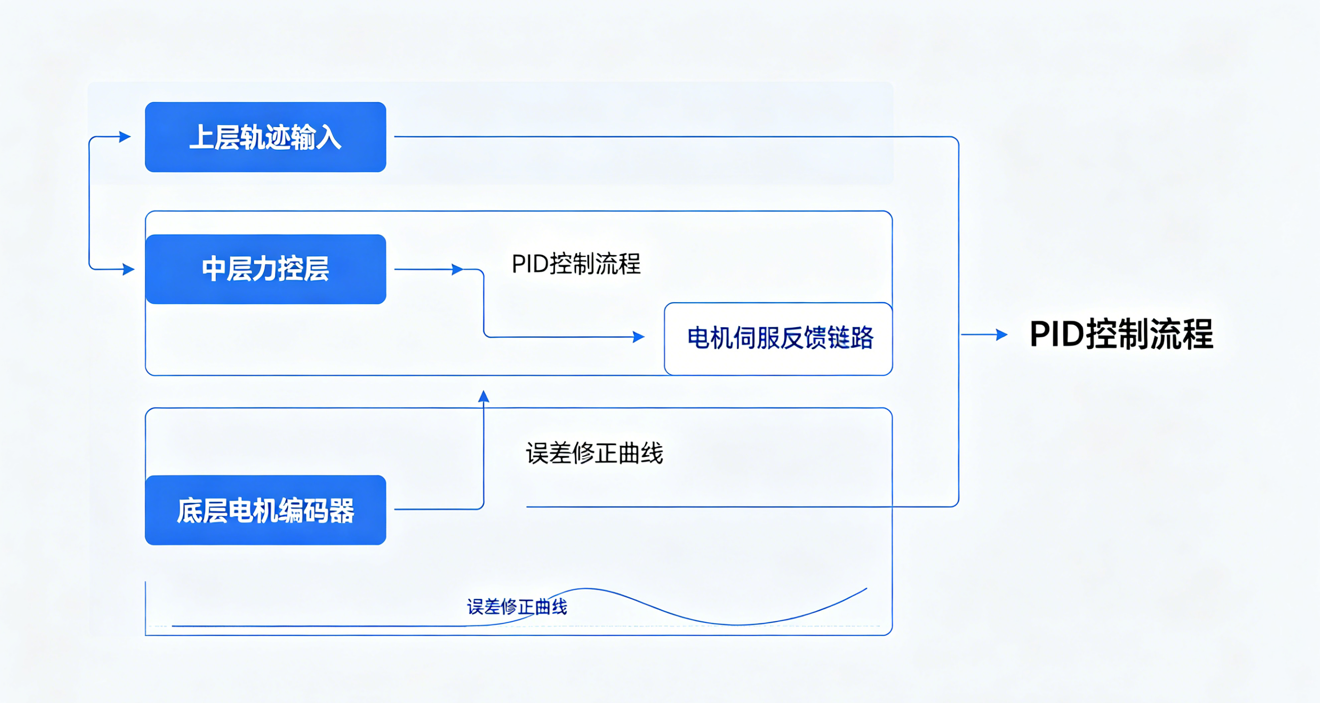
传统控制通常采用分层架构:
- 伺服控制:最内层,通常是PID控制。比较“期望位置”和“实际编码器读数”,输出电流指令。
- 力/阻抗控制:更高级,不仅控位置,还控接触力,保证机器人柔顺,不会“硬碰硬”。
传统运动控制的关键特征:
- 核心矛盾:轨迹跟踪误差。即“想的”和“做的”之间的差距。
- 工作原理:高频反馈(比如每秒1000次),不断修正偏差。
- 关注点:精度、稳定性和响应速度。
传统范式下的关系总结:
> 规划说了算,控制照着干。规划是“高层”,不考虑物理细节;控制是“低层”,不考虑任务目标。两者通过一条明确的轨迹接口解耦。
---
三、具身智能时代:边界的模糊与融合
传统划分在工业机器人焊装汽车、分拣零件时非常有效,因为环境高度结构化。但进入具身智能时代(如人形机器人、家用服务机器人),环境非结构化、动态变化、任务长周期,这种清晰边界被打破了。
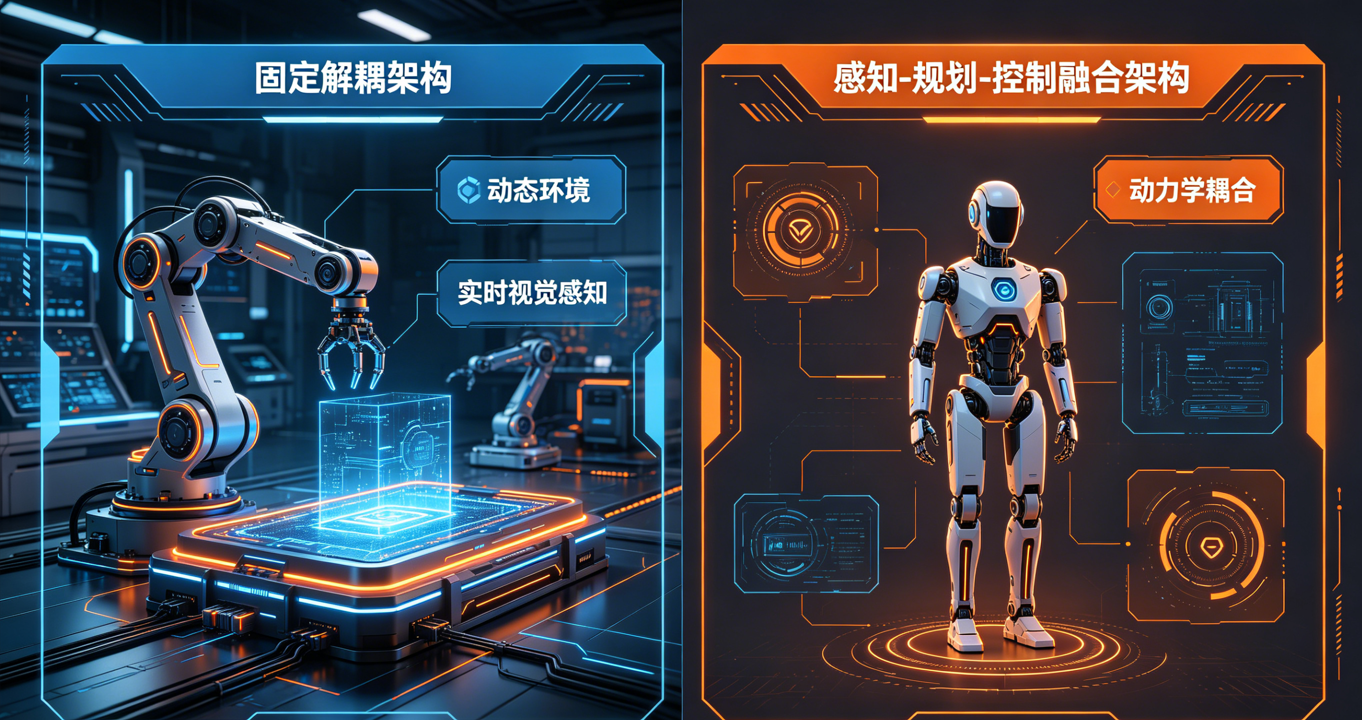
导致边界模糊的三个核心变化:
1. 从“离线已知”到“在线未知”:具身智能机器人无法事先知道所有障碍物和物体属性。规划必须在感知的同时滚动进行。
2. 从“运动学为主”到“动力学耦合”:传统规划常忽略动力学(如关节力矩限制),导致规划出的轨迹实际上电机无法执行。具身智能要求规划必须“身体力行”,考虑自身的物理极限。
3. 从“任务无关”到“与物理交互耦合”:开门、拧瓶盖、接住飞来的球——这些任务中,轨迹不是预定义的,而是实时响应外力、感知反馈的结果。此时,规划和控制的界限彻底模糊。
四、新架构:大脑(规划)与小脑(控制)的重构(含案例)
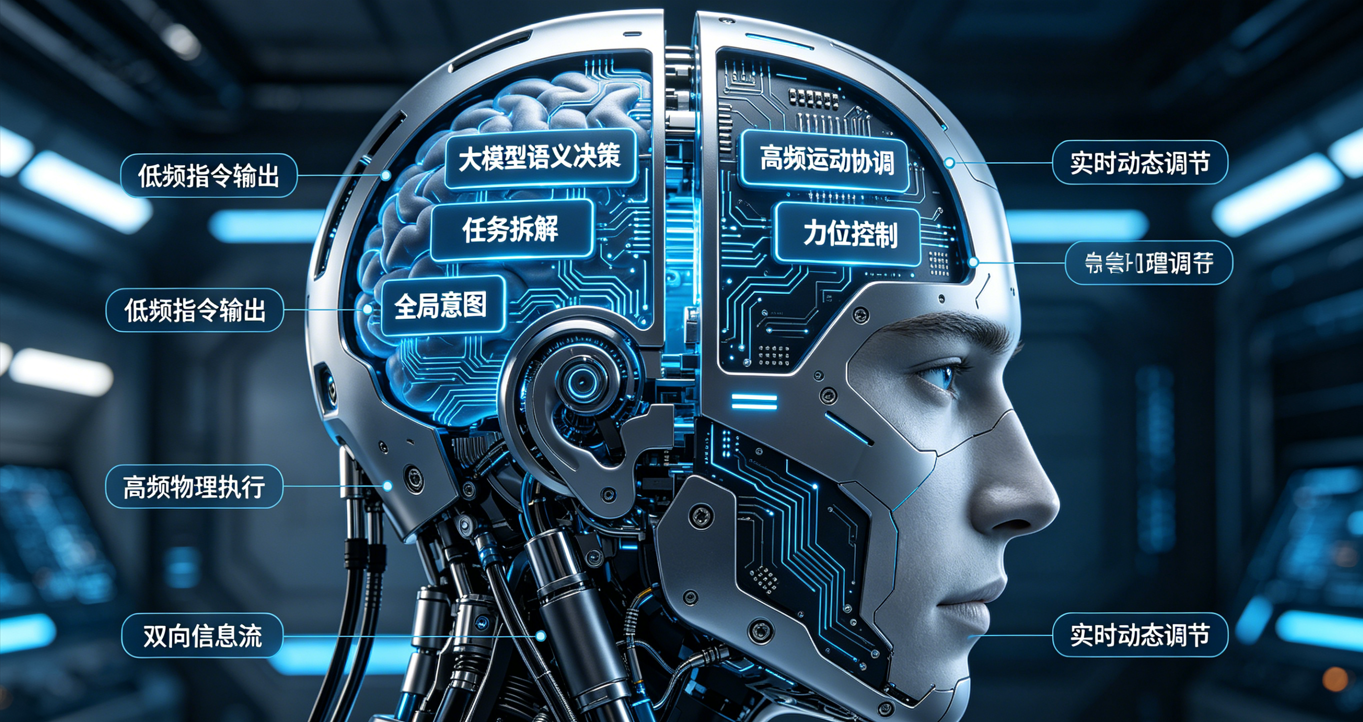
具身智能学界普遍采用“大脑-小脑”的双系统架构来重新定义传统概念:
- 大脑(对应高阶运动规划):
- 职能:意图理解、任务分解、场景语义推理。
- 输出不再是几何路径,而是技能指令或代价地图。比如:“走过去,用右手抓杯子手柄”——这是一个抽象技能序列,而非具体轨迹。
- 特点:低频(Hz级别)、基于大模型/强化学习、可泛化。
- 小脑(融合了传统控制与反应式规划):
- 职能:动态协调、力位混合、实时适应。
- 它不再被动跟踪大脑的轨迹,而是主动完成一个运动基元(比如“抓握”)。在此过程中,它根据触觉、力觉实时生成局部轨迹,同时完成“避障”和“力控”。
- 特点:高频(kHz级别)、基于经典控制或学习策略、鲁棒。
关键区别:在传统架构中,规划完全定好轨迹,控制死板跟踪;在大脑-小脑架构中,大脑只给“目标”和“约束”,小脑自主决定“如何达成”。小脑本身内嵌了反应式的运动规划能力。
> 案例1:人形机器人接住抛来的矿泉水瓶
> - 大脑(规划)的任务:视觉系统识别出飞来的瓶子,大脑快速判断:“瓶子落点大约在胸前30厘米处,预计0.8秒后到达。启动‘接住’技能,准备用双手合围。”
> - 小脑(控制+反应规划)的任务:小脑并不需要事先知道一条精确的轨迹。它一边实时追踪瓶子的三维轨迹,一边动态调整双臂的关节角度、速度和力矩。如果瓶子稍微偏左,小脑会立刻修正手臂的路径——这个过程不是大脑重新规划的,而是小脑自己“临场发挥”完成的。最终,手掌以合适的力度和角度合拢,稳稳接住瓶子,而不是生硬地拍飞它。
>
> 传统做法会怎样? 传统系统必须事先用高速相机精确计算出瓶子未来0.8秒的完整空间曲线,生成一条机械臂的跟踪轨迹,然后控制去死板跟踪——一旦瓶子轨迹有微小扰动(比如气流或旋转),就会接空。
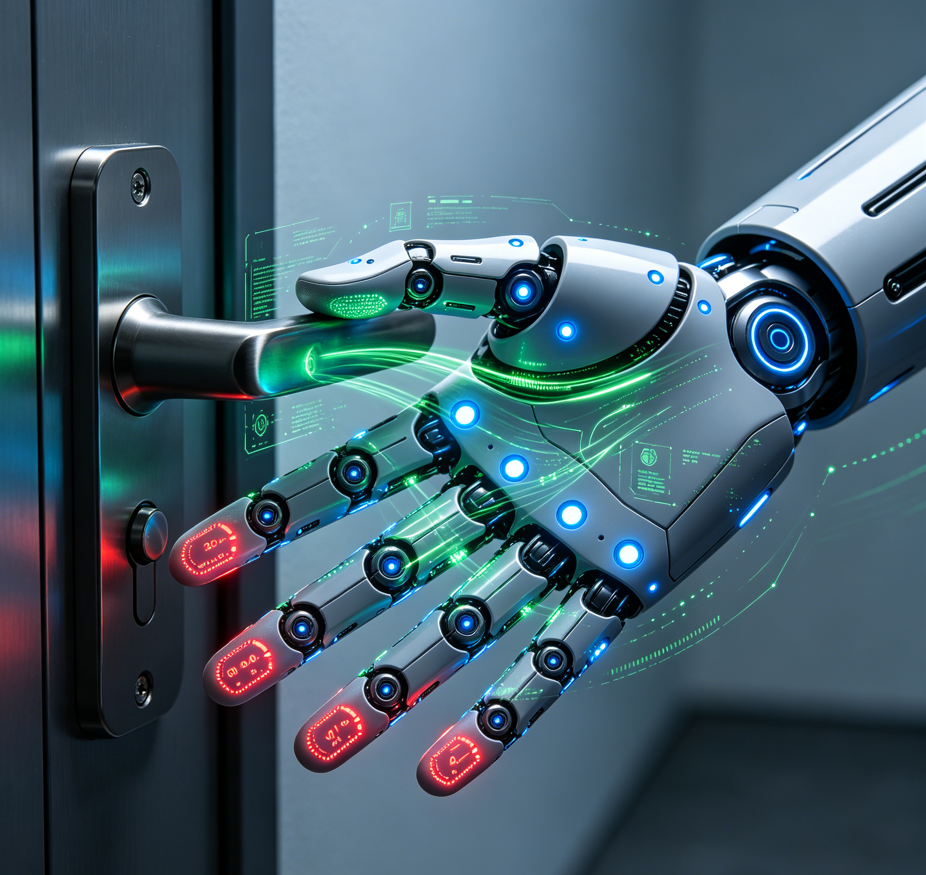
> 案例2:家用机器人开门(门把手是未知型号)
> - 大脑(规划)的任务:看到一扇门,大脑识别出“门把手是旋转式,位于门边缘”。它下达指令:“走到门前,右手握住把手,向左旋转,然后向后拉。”
> - 小脑(控制+反应规划)的任务:小脑控制手靠近把手时,触觉传感器反馈“碰到了金属表面”。它不知道自己握住的点是否最佳,于是轻轻滑动手指,微调抓取位置(这就是反应式规划)。旋转时,传感器发现阻力比预期大,小脑自动增加扭矩,同时稍微改变旋转轴线。整个过程中,小脑不断处理“摩擦力、刚度、角度偏差”这些物理细节,大脑从不过问。
>
> 传统做法会怎样? 必须提前建好门把手的精确CAD模型,规划出一条“接近→抓取→旋转→拉”的毫厘级轨迹,并且假设把手参数固定。换一扇不同型号的门,整个系统崩溃。
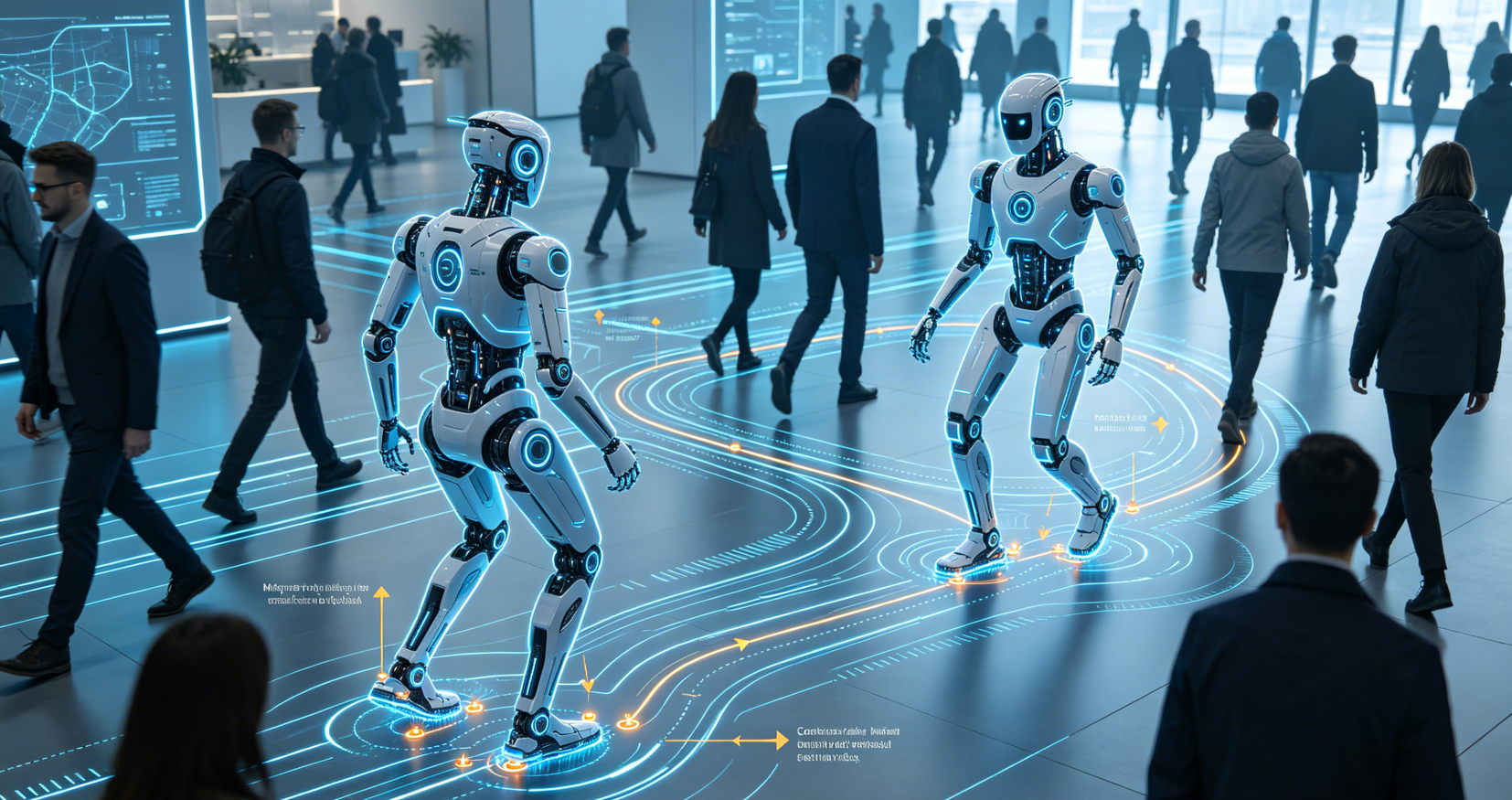
> 案例3:双足机器人在人群中行走
> - 大脑(规划)的任务:看一眼人群分布,规划出一条宏观路径:“从餐桌旁绕过去,穿过两把椅子中间,走到沙发前。”
> - 小脑(控制+反应规划)的任务:行走过程中,一个小孩突然横穿。小脑实时感知到脚步下的压力分布、身体的倾斜角度,自主决定“左脚快速跨出半步,身体重心右移,双臂摆动增大”。这个临时变向的局部路径(跨步位置、落脚点)完全由小脑生成,大脑只收到一个状态更新:“路径临时调整,最终目标不变。”
>
> 传统做法会怎样? 每一步都必须预先规划好落脚点,遇到动态障碍物只能停下重新全局规划,反应速度慢,极易摔倒。
五、给普通人一个更好懂的区别:导航员 vs. 驾驶员
结合具身智能时代的特点,可以用这个比喻来区分:
- 运动规划 —— **“导航员(比如汽车上的路线规划App)”**
- 做什么:出发前或中途,根据地图和实时路况,告诉你“走哪条路、在哪转弯”。它输出的是路线图(路径)。
- 特点:思考性、全局性。它不在乎你怎么踩油门、打方向,只关心“宏观上怎么到达”。在具身智能时代,这个导航员不再是死板的,而是会实时更新路线(“前方事故,请改道”)。

- 运动控制—— “驾驶员(你的双手和脚)”
- 做什么:握方向盘、踩油门、看后视镜,根据导航的指示和实际的路面状况(坑洼、侧风、前车急刹),实时、精细地操控车辆。
- 特点:反应性、局部性。它要处理颠簸、侧滑、跟车距离这些物理细节。在具身智能时代,这个驾驶员更聪明,如果导航说“穿过前方广场”,驾驶员自己会绕过广场上的行人(无需导航每一步都标出来)。
最终的核心区别一句话总结
运动规划回答“走哪条路”,运动控制回答“怎么走好这条路”。传统时代,规划给的是“铁轨”,控制只能沿轨道跑;具身智能时代,规划给的是“目的地和大概方向”,控制自己找路、自己适应、自己调整脚步。
理解了这个区别,你就能看懂当下人形机器人研发的难点:不是缺规划(有大模型),也不是缺控制(有PID),而是缺一个能把“目的地”高效转化为“身体动作”的、紧密耦合的“大脑-小脑”系统。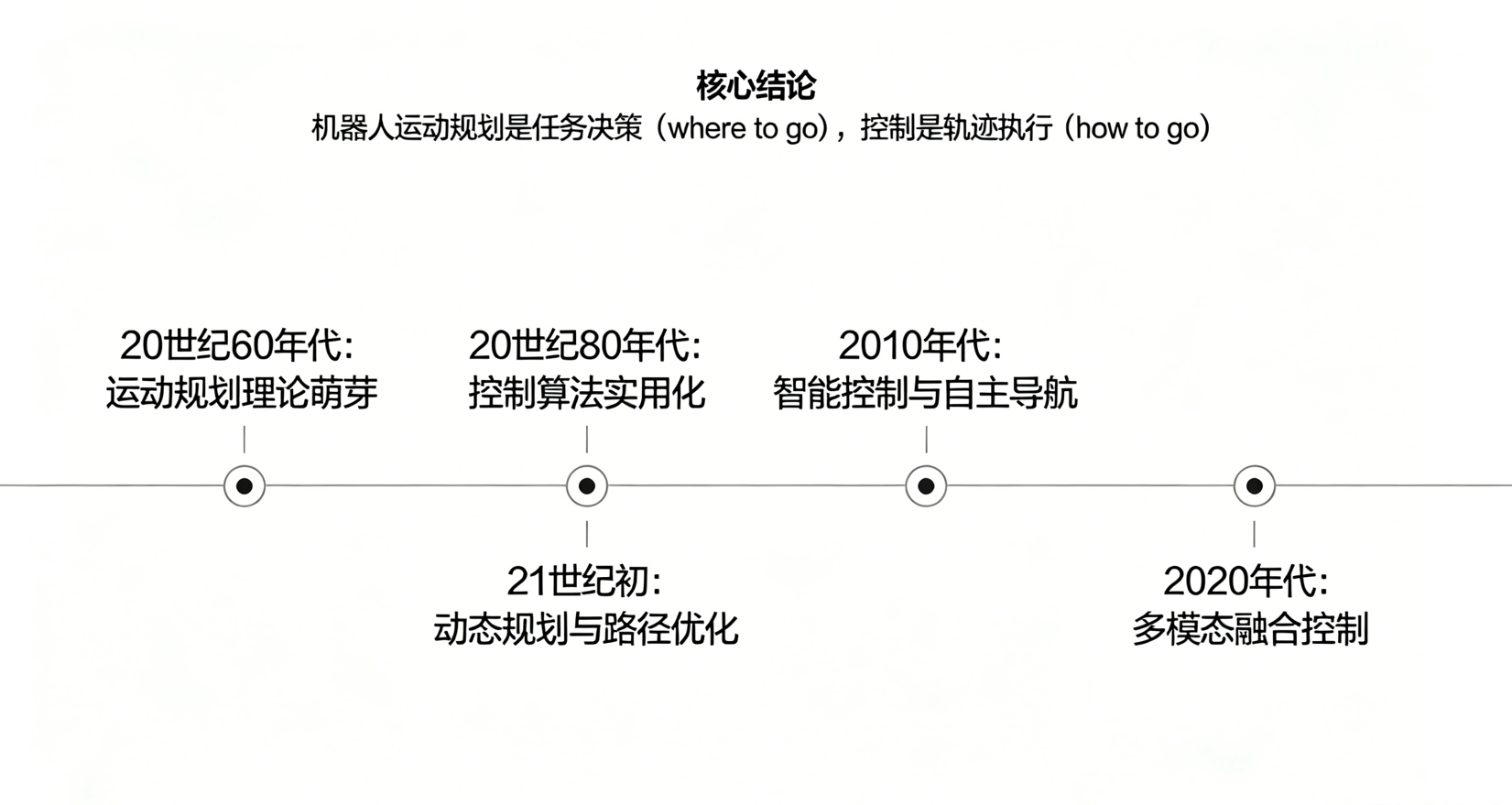
上述内容:仅为个人工作之余,兴趣爱好了解总结,内容含有AI辅助生成,仅供想要了解机器人与具身智能相关的看官参考,不做它用。

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐
 4
4 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)