
VLA已死,WAM是未来?大错特错,打通技术底座是实现架构互补的关键
VLA(视觉-语言-动作)以语言指令为接口、视觉感知为输入、动作执行为输出,意图理解成熟、部署成本低、产业验证充分,是服务、协作、早期人形机器人规模化落地的核心骨架,仍在持续迭代补齐物理约束与时序能力,远未到退场节点。大小脑融合+算控一体,兼容VLA、面向WAM ,这是阿帕奇业内首创大小脑融合架构,打破控制器物理与逻辑隔阂,从根源解决“想得快、反应慢”行业死穴,构建感知决策与运动执行的高效协同体系
2026年上半年,具身智能赛道出现“范式替代”论调:英伟达高管提出VLA已死,WAM(世界-动作模型)才是未来,行业一度将VLA标签化、将世界模型过度神化。

回归产业现实:VLA仍是当前量产的通用基座,WAM代表长期方向但工程化尚不成熟。二者并非非此即彼,而是协同互补。
一、理性看待:VLA有短板但不过时,WAM有前景但非万能
VLA的不可替代性
VLA(视觉-语言-动作)以语言指令为接口、视觉感知为输入、动作执行为输出,意图理解成熟、部署成本低、产业验证充分,是服务、协作、早期人形机器人规模化落地的核心骨架,仍在持续迭代补齐物理约束与时序能力,远未到退场节点。
WAM的现实局限
WAM具备物理预判与环境建模能力,但算力与数据成本高、实时性与工程化不足,大量搬运、巡检、服务场景无需“全知全能”,强行一刀切替代会造成资源错配、延缓量产节奏。 具身智能的正道,不是范式对立,而是VLA负责快速意图理解、WAM负责长期物理预判,以统一算控底座实现协同落地
二,机器人神经中枢:大小脑方案,兼容两种方向
控制器,被称为机器人的“神经中枢”,其性能直接决定了机器人的智能化水平与运动能力。在具身智能快速崛起的今天,一套高效、可靠且灵活的控制系统,成为机器人落地各类场景的核心瓶颈。
大小脑融合+算控一体,兼容VLA、面向WAM ,这是阿帕奇业内首创大小脑融合架构,打破控制器物理与逻辑隔阂,从根源解决“想得快、反应慢”行业死穴,构建感知决策与运动执行的高效协同体系。
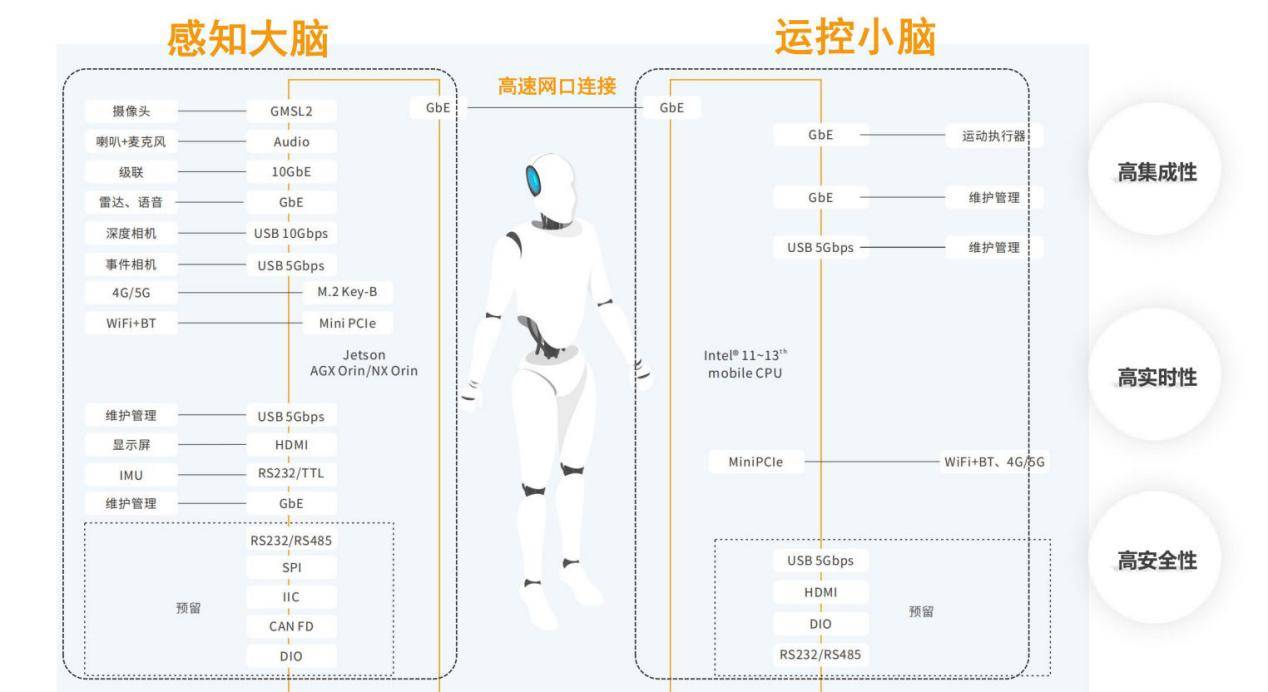
1.大脑层:高算力支撑,双范式灵活适配 - 最高275 TOPS算力,流畅运行7B大模型,可同时承载VLA快速语义决策与WAM世界状态预判。 支持Intel、NVIDIA、地瓜、瑞芯微等主流平台,算力按需配置,保护现有投资、平滑升级WAM。
2.小脑层:高实时执行,保障控制确定性 - 控制节拍1000 Hz,网络抖动2–35μs,EC通信抖动≤70μs,进程抖动≤40μs,支持38–70关节精准协同。
具备局部自主决策与自适应调整,大幅降低大脑交互延迟,无论VLA还是WAM决策,执行都不掉链。
先看他们的控制器,轻量化设计做得很极致,体积在行业里算领先水平,能给机器人胸腔腾出高达35%的空间,这在实际整机设计里太宝贵了。而且工业级可靠性:抗冲击超过30G,三防加宽温散热,严苛环境也扛得住。
实时性方面,1000Hz的控制频率,响应延迟不到1毫秒,又快又准。再加上自研的运维工具、ROS系统、SDK,整套软硬件一体交付,开发门槛和部署周期都降下来了。
另外不得不说阿帕奇是国内第一家把具身机器人控制器做到量产的。已经服务了60多家行业客户,交付了3000多套方案。智元、智平方、中兴、中汽这些头部企业都在用。是用扎实的工程化能力,验证了大小脑融合架构的可行性。

兼容VLA:低延迟、高可靠、高性价比,先让企业活下去、快速量产变现;
面向WAM:高算力、高实时、高扩展,以后模型升级了也能无缝接上,不用重复投入。
总结一句:异构融合加微秒级协同,不管什么模型,都能稳定落地、高效执行。

“VLA已死”、“WAM封神”之类的论调。是资本和媒体起哄。VLA是今天能用的底座,支撑规模化交付;WAM是明天要走的进化方向,打开了长期天花板。真正的产业进步,从来不是把昨天的东西都否定,而是兼容并蓄、稳步升级。
阿帕奇这套大小脑融合算控平台,就是贯穿今天和明天的通用底座。不追热点、不造神,踏踏实实把核心技术做深,给中国具身智能产业把量产根基筑牢——这个路子,是对的。

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐
 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)