
彻底搞懂具身智能必备知识:李群、李代数、四元数
轨迹的本质是SE(3)的序列,我们可以通过对数映射将SE(3)转化为se(3),通过梯度下降优化se(3)向量,再通过指数映射转化回SE(3),得到符合物理规律的最优轨迹;,李群与李代数的价值尤为突出:它们解决了姿态表示的万向锁问题,通过李代数的线性化特性实现了轨迹优化的可微性,依靠李群的约束规则保证了行驶动作的物理一致性,让自动驾驶汽车能够在复杂路况中精准定位、顺畅避让;李群的核心作用,是描述三
具身智能 ≈ 李群上的机器学习?
大家好,这里是【深蓝具身智能】。
一直以来,我们都在这里分享具身智能的前沿进展:最新的论文、惊艳的 demo、不断刷新的基准。承蒙大家厚爱,每一份阅读和留言都是我们坚持创作的动力。
与此同时,我们也经常能收到粉丝的留言:新概念好多感觉追也追不完,深蓝有没有可能聊聊那些更底层、更扎实的东西?
我们也深有同感。第一性原理,其实在具身智能的研发里无处不在。再新的方法,也脱胎于那些“老派的”基础。不如一起蹲下来,把这些构成具身智能骨骼的东西,一块一块重新捡起来,用今天的眼光理解一遍。于是,我们推出了——《具身智能基础》这一专栏。
第一篇,我们从 李群代数 聊起。本文约 10000 字,建议先收藏。
目录
我们十年前学机器人的时候,旋转变换可以用欧拉角顶一顶,实在不行上旋转矩阵。SLAM 里用四元数做状态变量,微分的时候小心翼翼加个扰动。反正,用各种 hack 和补丁,一切似乎都过得去。(了解背景的朋友,可以跳过这一部分)
后来,业内开始将深度学习与物理运动深度耦合,问题就集中爆发了。
为什么?
在传统 SLAM、轨迹优化、运动控制里,处理旋转和刚体运动时,我们并不是真的在欧拉角空间里做优化(狭义的形容)。
深度学习的介入改变了游戏规则:把原本藏在优化器内部的几何操作,暴露到了网络的前向传播和反向传播中。
当具身智能需要让神经网络输出动作、需要在大范围姿态变化中做优化、需要保证生成的运动轨迹严格物理可行时,绕路就走不大通了。我们必须直面旋转空间的真正结构。
而这个结构,就叫李群。
这也是我们第一篇文章,选择从李群、李代数、四元数开始的原因。
本文不打算停留在概念介绍层面,而是希望通过系统的数学推导,将三者之间的转换关系与工程中(具身智能、自动驾驶)的使用边界一次性讲清楚。
文章中会包含大量公式,但每一个推导都服务于一个具体的问题。
01 通俗解释:李群与李代数
要理解李群与李代数,我们无需上来就陷入复杂的数学定义,只需抓住“描述运动”这一核心。
二者都是用来刻画三维空间中物体“姿态”和“运动”的工具。
区别在于一个描述“真实状态”,一个提供“计算便利”。
李群:三维空间中“合法运动”的集合
李群的核心作用,是描述三维空间中物体的“姿态”和“刚体运动”,我们最常用的就是李群中的两个核心成员:SO(3)和SE(3)。
它们就像两个“运动规则手册”,规定了物体在空间中能做哪些合法运动。
一、SO(3)(三维特殊正交群,Special Orthogonal Group 3)
核心是“纯旋转”,完全不涉及平移,是李群中描述三维空间旋转的核心集合。
从数学定义来看,SO(3)是所有3×3正交矩阵的集合,且每个矩阵的行列式为1,这两个约束条件确保了旋转的合法性:
旋转后物体的形状、大小不变,不会出现扭曲、拉伸等不符合物理规律的情况。
其核心公式(SO(3)定义约束)为:
,
同时满足旋转矩阵乘法(姿态叠加)公式:
(A 相对于 B 的旋转 = A 相对于 C 的旋转 × C 相对于 B 的旋转)。
SO(3)的核心是描述三维空间的“合法纯旋转”,核心要求是旋转后物体形状、大小不变,即旋转过程满足“正交性”和“右手定则”。这两个约束公式的推导过程如下:
(1)正交性约束推导:
旋转本质是线性变换,若用矩阵 表示旋转,对于空间中任意向量
,旋转后向量为
由于旋转不改变向量长度,即
根据向量模长公式,
又因为,因此
对任意向量
成立;
可推出(
为
单位矩阵),即旋转矩阵为正交矩阵。
(2)行列式约束推导:
正交矩阵的行列式满足 ;
而
因此 ,即
;
由于 描述的是“右手旋转”(符合物理世界的旋转方向,如顺时针、逆时针旋转),排除
(对应镜像反射,非真实旋转);
最终得到。
综上,SO(3)的定义约束公式确保了旋转的合法性。
通俗来说,就是物体在原地转圈、翻身、扭头,位置不变,只改变朝向。
比如机器人的头部转动、相机调整拍摄角度,这些都属于SO(3)描述的范畴。
SO(3)本质上是所有“合法旋转”的集合,每一个旋转姿态(比如转30度、转90度),都是SO(3)这个集合里的一个元素。
它为三维旋转提供了严格的几何规则,是具身智能中姿态表示的基础。
二、SE(3)(三维特殊欧氏群,Special Euclidean Group 3)
核心是“全套刚体运动”,即“旋转+平移”的组合,是 SO(3)的拓展与延伸,也是描述三维空间中刚体运动最全面的李群。
其关键公式(SE(3) 齐次变换矩阵)为:
,
其中,(旋转矩阵),
(平移向量),
(3 维零行向量)。
SE(3)是“旋转+平移”的组合,用于描述三维空间中刚体的完整运动,如自动驾驶汽车行驶+转向、机器人手臂移动+调整角度。
该公式的推导过程如下:
(1)刚体运动的原始表达:
空间中任意点,经过旋转
和平移
后,得到新坐标
,原始关系式为
但该式为非齐次线性方程,无法直接通过矩阵乘法实现多个运动的叠加(如先旋转平移,再旋转平移),不利于工程计算。
(2)齐次化改造:
为了统一旋转和平移的计算,引入齐次坐标,将 3 维向量 扩展为 4 维齐次向量
此时,旋转和平移可合并为一个 矩阵
,即
与原始关系式一致。
(3)合法性约束:
由于 中的
必须满足
的约束,即:
,
因此的核心约束是“旋转矩阵符合
,平移向量无额外约束”。
最终形成上述齐次变换矩阵公式,完美覆盖刚体运动的所有情况。
数学定义来看,SE(3)由平移向量和SO(3)旋转矩阵组成:
通常用一个4×4的齐次变换矩阵表示,既能体现物体的位置(平移向量),又能体现物体的朝向(旋转矩阵),完美覆盖了三维空间中刚体运动的所有可能情况。
通俗来说,就是物体既改变位置,又改变朝向,这是现实世界中最常见的运动形式。
比如自动驾驶汽车在路上行驶,同时调整车头朝向避让障碍物;
机器人手臂从一个位置移动到另一个位置,同时调整抓取角度。
SE(3)作为具身智能描述智能体状态的核心工具,能完整捕捉智能体的“位置+姿态”,为后续的感知、规划、控制提供精准的状态基础。
具身智能中的刚体运动,不仅包含旋转,还包含平移。旋转矩阵加上平移向量构成 SE(3),即三维特殊欧几里得群。
它同样是李群,一个六维的流形。
机械臂的末端位姿、无人机的空间位置与姿态、相机的外参……所有这些,都是 SE(3) 中的点。
三、简单总结
李群(SO(3)、SE(3))就是“真实物理世界中物体运动的合法集合”,它规定了智能体的姿态和运动必须遵循的规则,确保运动符合物理规律,不出现“不合常理”的状态,比如物体旋转后形状扭曲。
李代数:把“弯曲运动”掰平的“计算工具”
李代数是李群的“配套工具”,对应SO(3)的李代数是so(3),对应SE(3)的李代数是se(3)。
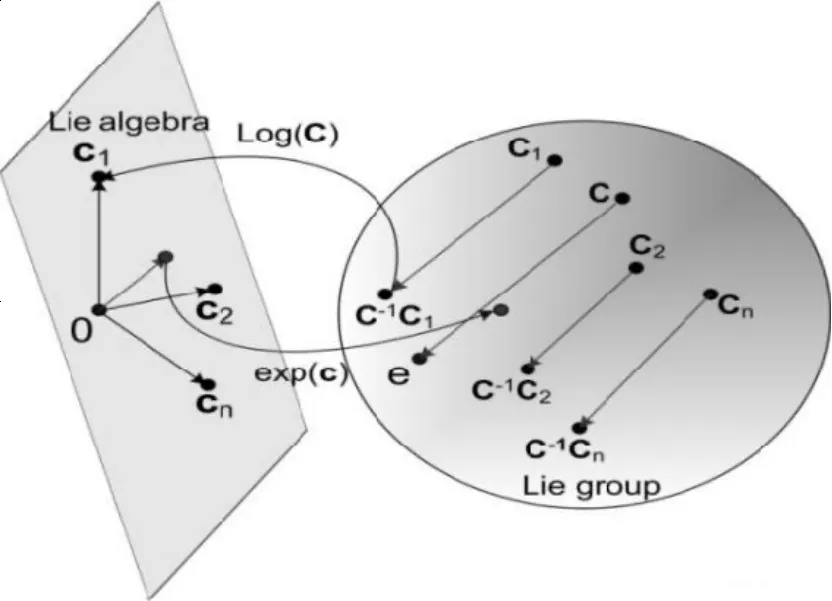
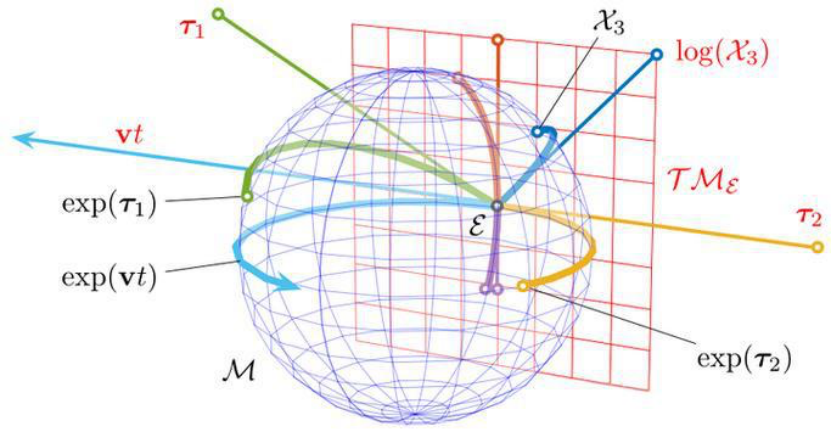
我们可以用一个生活化的比喻理解二者的关系:
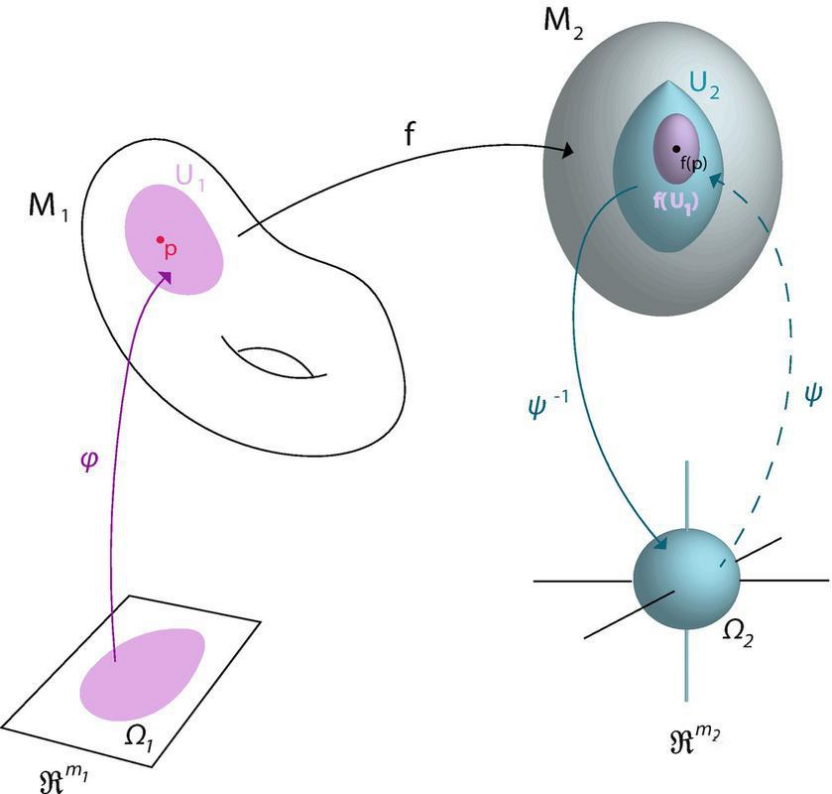
把李群(SO(3)/SE(3))比作“球形地球”,地球表面是弯曲的,就像李群中物体的姿态的运动轨迹是非线性的,无法直接用简单的加减、求导来计算;
而李代数(so(3)/se(3))就是“平面地图”,它把弯曲的球面(李群)摊平成平面(线性空间),让我们可以用简单的数学运算(加减、求导)来处理姿态和运动。
熟悉数学的读者是否想起了,非线性计算的线性化近似呢?
就是类似的思想。
与SO(3)、SE(3)相对应,李代数也分为两类:so(3)和se(3)。
一、so(3)是3维向量空间,对应SO(3)的“旋转增量”,比如:
机器人转头的角度变化、相机拍摄方向的微小调整,这些微小的旋转变化,都可以用so(3)这个3维向量来表示。
它本质上是SO(3)在单位元处的切空间,承载着旋转的微小变化量。其核心公式如下:
(1)关键公式1(so(3)定义):

(2)关键公式2(指数映射,so(3)→SO(3)):

简化后为

(3)关键公式3(对数映射,SO(3)→so(3)):

其中,
为旋转矩阵
的迹。
so(3)是SO(3)在单位元(单位旋转矩阵I)处的切空间,核心作用是将SO(3)的非线性旋转转化为线性向量(旋转增量),方便计算优化。
这些公式的推导过程如下:
(1)so(3)定义推导:
中的旋转矩阵
满足
,对该式两边关于时间
求导,假设
,表示旋转随时间变化;
- 得到
,整理得
,说明
是反对称矩阵(满足
);
- 令
,则
是
反对称矩阵,而 3 维反对称矩阵的集合可与 3 维向量
一一对应;
- 对应关系即为上述
的矩阵形式(称为向量
的“反对称化”)。
- 因此
定义为所有 3 维向量的反对称化集合。
(2)指数映射推导:
指数映射的核心是将线性的 so(3) 向量 (旋转增量)转化为非线性的 SO(3) 旋转矩阵 R。
由于是反对称矩阵,可利用泰勒展开推导指数映射:
- 首先,计算
的幂次:

后续幂次可循环推导;
-
然后将幂次代入泰勒展开式,结合三角函数泰勒展开:

其中
-
最后整理可得上述简化公式。
该公式与原始泰勒展开式等价,且更便于工程计算,实现了so(3)到SO(3)的转化,是具身智能中姿态优化的核心链路。
二、se(3)是6维向量空间,对应SE(3)的“运动增量”
包含3个平移增量(前后、左右、上下)和3个旋转增量(绕X、Y、Z轴的转动),比如自动驾驶汽车行驶时的微小位移和方向调整,就可以用se(3)来描述。
它是SE(3)在单位元处的切空间,完整对应刚体运动的微小变化。其核心公式如下:
(1)关键公式1(se(3)定义):

(2)关键公式2(指数映射,se(3)→SE(3)):
这些公式的推导过程如下:
se(3) 是 SE(3) 在单位元(单位齐次矩阵)处的切空间,对应 SE(3) 的“运动增量”(3 个旋转增量
+ 3 个平移增量
)。
(1)se(3)定义推导:
类比so (3) 的推导,SE(3) 中的齐次矩阵 满足
(逆矩阵公式)。
对 两边关于时间
求导,得到
,
说明 是
反对称矩阵(广义反对称矩阵)。
令 ,则
可表示为上述
矩阵形式。
其中 是
反对称矩阵(对应旋转增量),
对应平移增量。
因此se(3)定义为所有6维向量ξ的广义反对称化集合。
(2)指数映射推导:
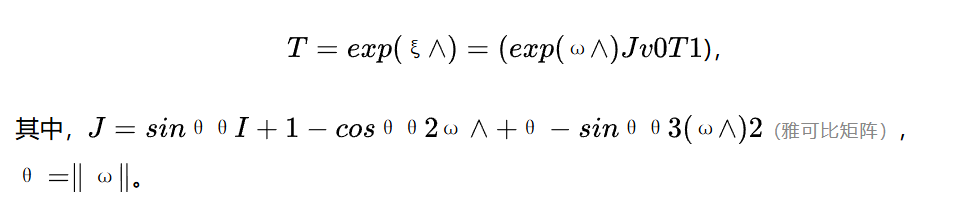
se (3)的指数映射是将 6 维线性向量 (运动增量)转化为
齐次变换矩阵
。
由于 可拆分为旋转部分和平移部分,结合 so(3) 的指数映射,对
做泰勒展开,分离旋转和平移项:
旋转部分:(与so(3)到SO(3)的指数映射一致);
平移部分:通过泰勒展开整理,得到 ,其中
为雅可比矩阵,用于补偿旋转对平移的影响(避免平移计算出现偏差)。
三、简单总结
李代数的核心价值的是“线性化”:
李群中的运动是非线性的(比如旋转不能直接相加),无法直接用于深度学习的梯度下降、反向传播;
而李代数把这种非线性运动转化为线性向量,让智能体的大脑(神经网络)可以轻松计算、优化动作。
这也是李代数能成为具身智能核心工具的关键原因之一。
02 李群与李代数在具身智能(含自动驾驶)中广泛应用的原因
具身智能的核心需求,是让智能体在三维物理世界中“精准感知、稳定决策、顺畅执行”,而李群与李代数恰好解决了这一过程中的痛点
——既保证运动的物理合理性,又适配深度学习的计算需求。
无论是人形机器人、自动驾驶,还是智能物流设备,只要涉及三维空间中的姿态感知、运动规划、动作控制,都离不开李群与李代数。
具体原因可分为以下三点。
(一)解决“姿态表示”的核心痛点,避免运动异常
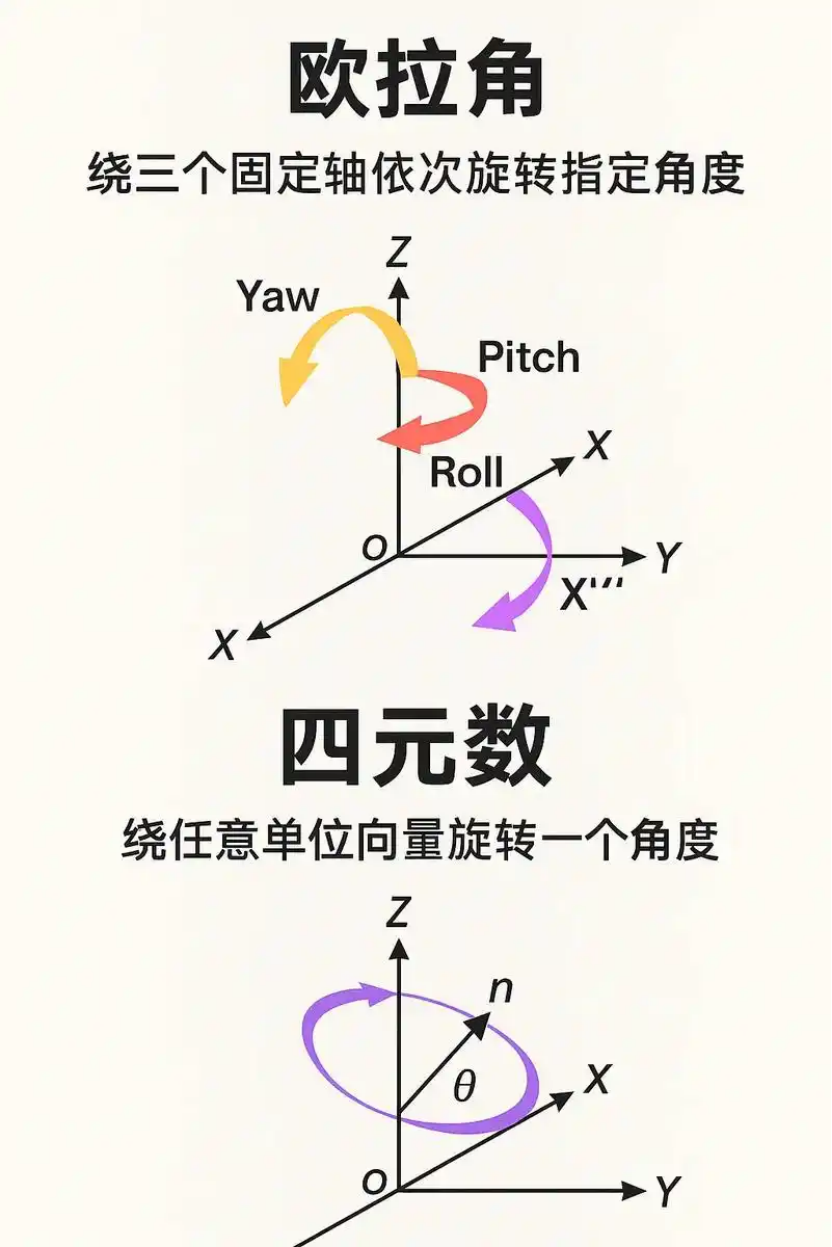
在具身智能中,智能体的姿态表示,比如机器人的朝向、自动驾驶汽车的车头方向是基础,而传统的姿态表示方法(欧拉角)存在致命缺陷,比如:
万向锁:当物体绕Y轴旋转90度时,会丢失一个自由度,导致无法完成某些旋转动作。
这在实际应用中会导致智能体动作卡顿、失控,比如自动驾驶汽车避让障碍物时,车头方向无法正常调整。
李群(SO(3)、SE(3))完美解决了这个问题:
SO(3) 描述的旋转没有万向锁,其定义约束公式 能精准表示三维空间中的任意旋转姿态;
SE(3) 则通过齐次变换矩阵完整表示“位置 + 姿态”,确保智能体的运动符合物理规律。
而李代数(so(3)/se(3))则通过指数映射与对数映射,为姿态的优化提供了可能,让智能体可以快速调整姿态,避免运动异常。
比如在自动驾驶的SLAM(同步定位与地图构建)中,相机和汽车的位姿都用SE(3)表示,确保定位精准,不会出现姿态偏差导致的导航失误。
这也是李群在自动驾驶中最基础的应用场景之一。
(二)适配深度学习,实现“可微优化”
具身智能的核心是“学习能力”——智能体需要通过大量数据训练,优化自己的动作策略(比如机器人学习抓取物体、自动驾驶汽车学习避让行人)。
而深度学习的核心是“梯度下降”,需要对优化变量进行求导,这就要求优化变量必须是线性的、无约束的。
李群中的姿态:旋转矩阵、变换矩阵,是非线性的、有约束的(比如旋转矩阵必须满足),无法直接用于梯度下降;
而李代数(so(3)/se(3))是线性向量,无约束,可直接求导、做反向传播,完美适配深度学习的计算需求。
- 比如在自动驾驶的轨迹优化中:
智能体需要根据路况调整行驶轨迹。轨迹的本质是SE(3)的序列,我们可以通过对数映射将SE(3)转化为se(3),通过梯度下降优化se(3)向量,再通过指数映射转化回SE(3),得到符合物理规律的最优轨迹;
- 比如在人形机器人的运动控制中:
关节姿态的优化也是通过“李群(姿态表示)→李代数(线性优化)→李群(动作执行)”的链路实现的,确保机器人的动作顺畅、稳定,同时具备自主学习能力。
(三)保证“物理一致性”,适配真实世界场景
具身智能与传统AI的最大区别,是需要“嵌入”真实物理世界,动作必须符合物理规律。
比如机器人抓取物体时,手臂的运动轨迹必须符合刚体运动规则,不能穿透物体;自动驾驶汽车的转向、刹车,必须符合三维空间的运动规律,不能出现“瞬移”“扭曲”等不合常理的动作。
李群(SO(3)、SE(3))本身就蕴含了刚体运动的几何规则,SO(3)的正交性和行列式约束、SE(3)的齐次变换矩阵结构,用李群表示智能体的姿态和运动,能天然保证物理一致性;
而李代数则在不破坏物理规则的前提下,通过指数映射与对数映射实现动作的优化和调整。比如在智能驾驶的位姿图优化中,每个位姿节点用SE(3)表示,相邻位姿的变换约束用SE(3)或so(3)表示,通过李代数计算误差和雅可比矩阵,确保优化后的轨迹符合真实物理世界的运动规律,避免出现导航偏差、动作失控等问题。
简单来说,李群与李代数的组合,既让智能体动作符合真实世界规则,又让智能体适配深度学习的优化需求,这也是它们在具身智能(尤其是自动驾驶)中不可或缺的原因。
03 四元数与李群、李代数的关系
在具身智能的实践中,我们经常会听到“四元数或者哈密尔顿四元数”这个概念,其实它和李群、李代数一样,都是描述三维旋转的工具。
但三者的定位、用途完全不同。大致关系可以概括为:四元数是李群(SO(3))的“便捷存储格式”,李代数(so(3))是四元数的“优化工具”。
三者本质上都是描述三维旋转,又分工不同。
(一)各自定位:三者各司其职,互不替代
首先明确三者的各自定位,避免混淆:
-
李群SO(3):
是“旋转的集合”,定义了三维旋转的所有合法形式,是旋转的“底层规则”。
其核心约束公式规定了旋转必须遵守的几何约束,不直接参与计算,只规定旋转必须遵守的几何约束。
-
四元数:
是李群SO(3)的“表达形式之一”(李群里面最常用、最好用的一种姿态写法),用4个数字(1个实部+3个虚部)表示一个三维旋转,是工程实践中最常用的“姿态存储格式”。
其关键公式(四元数定义)为:
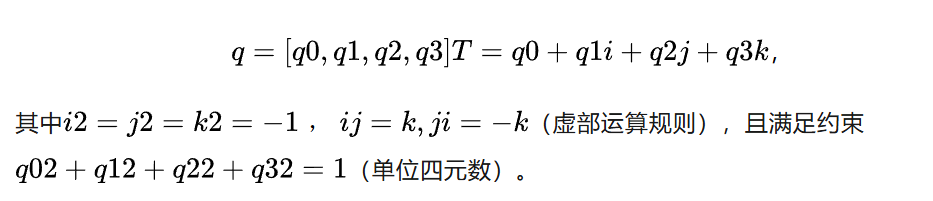
它的优势是无万向锁、计算高效、插值顺滑,而且代码实现简单,广泛应用于机器人、自动驾驶的姿态存储和简单旋转计算。
-
李代数so(3):
是“旋转增量的线性表示”,用3个数字表示旋转的微小变化,是“优化工具”。
其核心的指数映射和对数映射公式,实现了与SO(3)、四元数的转化,优势是线性、无约束,可直接用于梯度下降、反向传播,解决四元数和SO(3)无法直接优化的问题。
(二)核心关联:三者的转换链路
在具身智能的实际应用中,三者的转换是高频操作,操作路线非常清晰,我们用通俗的流程来描述:
-
智能体感知到当前姿态,比如相机拍摄方向、机器人手臂朝向,用四元数存储这个姿态;
-
当需要优化姿态,比如调整相机角度、修正机器人手臂位置时,先将四元数转化为so(3)(线性向量),在so(3)空间中做梯度下降、误差计算,完成优化;
四元数转化为so(3)的关键的是:
(1)先通过公式将四元数转化为SO(3)旋转矩阵R:

(2)再通过so(3)的对数映射
得到so(3)向量ω。
-
优化完成后,将so(3)(旋转增量)转化为四元数,更新智能体的姿态,确保姿态符合SO(3)的规则(合法旋转)。
这一步需先通过so(3)的指数映射将ω转化为旋转矩阵R,再结合四元数与旋转矩阵的转化公式,得到对应的单位四元数。
-
智能体执行动作时,四元数对应的姿态就是SO(3)中的一个合法旋转,保证动作符合物理规律。
从数学角度来说,三者的转换依赖“指数映射”和“对数映射”:
-
so(3)通过指数映射,可以转化为四元数或SO(3)的旋转矩阵;
-
四元数或SO(3)的旋转矩阵,通过对数映射,可以转化为so(3)向量。
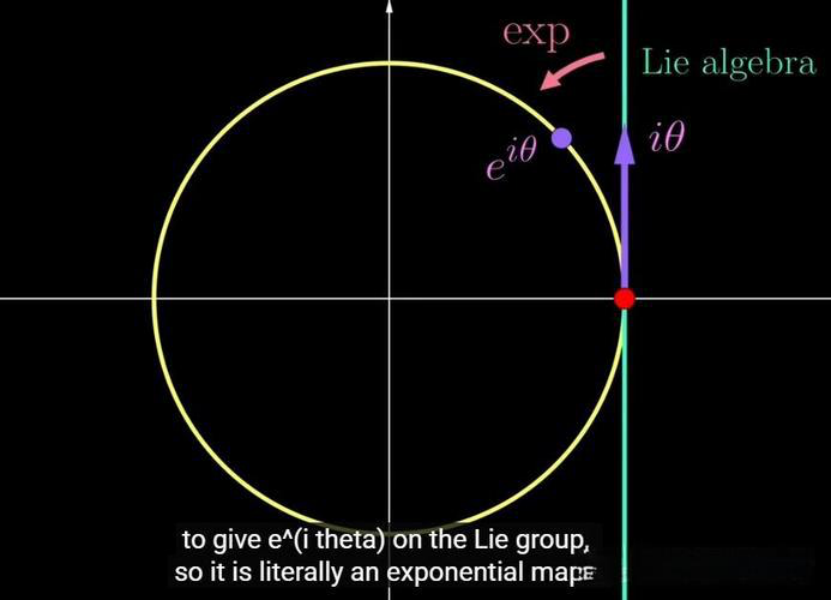
这种映射关系,实现了“线性优化”与“物理合法”的兼顾,也是三者能够协同工作的桥梁。
其中,四元数与SO(3)旋转矩阵的推导核心是“四元数旋转与旋转矩阵旋转的等价性”。
公式如下:
(1)四元数旋转的原始表达:
空间中任意3维向量 ,用四元数表示为
(纯虚四元数),经过四元数
旋转后,得到新向量对应的四元数
(
为
的逆,单位四元数的逆满足
)。
(2)转化为矩阵形式:
将 展开,整理后可表示为
其中 即为上述
旋转矩阵,该矩阵满足
的约束
证明四元数与SO(3)的旋转矩阵等价。
(3)约束条件推导:
由于四元数对应SO(3)的合法旋转,因此必须满足单位化约束
若四元数非单位化,旋转后向量长度会发生变化(不符合刚体旋转规则)。
因此工程实践中均使用单位四元数表示姿态,确保与SO(3)的一致性。
(三)优缺点对比:为什么需要三者协同?
单独使用某一种工具,都无法满足具身智能的需求,三者的协同正是为了互补长短:
-
四元数:
优点是无万向锁、存储高效、插值顺滑,适合姿态存储和简单旋转计算;
缺点是有约束(模长必须为1),无法直接用于深度学习的梯度优化。
四元数可以想象为高阶的复数,但是不存在三元数。
-
so(3)李代数:
优点是线性、无约束,可直接求导、优化,适配深度学习;
缺点是只能表示“微小旋转增量”,不适合长期存储姿态。
-
SO(3)李群:
优点是定义了旋转的合法规则,保证物理一致性;
缺点是非线性、有约束,无法直接计算和优化。
举个例子:
比如在自动驾驶中,汽车的姿态用四元数存储,避免万向锁和存储冗余;当需要优化行驶轨迹、修正车头方向时,将四元数转化为so(3),通过梯度下降优化旋转增量,再转化回四元数更新姿态,确保姿态符合SO(3)的规则,既保证了计算高效,又保证了物理合理。
一些基础概念补充
-
万向锁
顺带说明一下,万向锁是传统姿态表示方法,如欧拉角。
理解欧拉角的关键是,不要以为xyz三个自由度会像坐标系一样始终保持两两正交,不是一定两两正交的。
它的致命缺陷,指当物体绕某一轴(通常是中间轴,如欧拉角的 Y 轴)旋转至 90 度时,会丢失一个旋转自由度,导致两个旋转轴重合,无法完成某些特定方向的旋转动作。
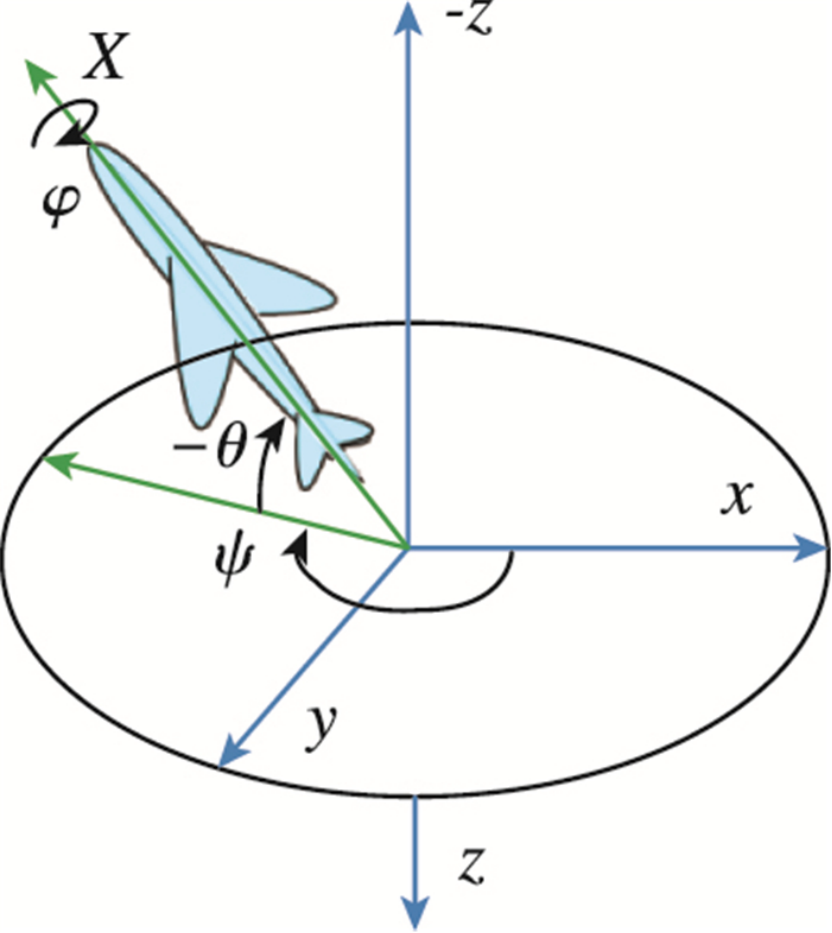
通俗来说,就像相机或机器人转头时,若先绕 Y 轴转 90 度,再想绕 X 轴或 Z 轴旋转,会发现两个旋转方向 “重合”,无法实现预期的转向,出现动作卡顿、失控的情况
—— 这就是万向锁。
▲图| 陀螺仪表示的三轴并不一定正交的欧拉角
-
丢失自由度
为了清晰,我们再描述一下丢失自由度,虽然有点冗余。
我们可以把欧拉角的三个旋转轴(比如“俯仰 - 偏航 - 滚转”)想象成相机的三个调节旋钮,正常情况下三个旋钮各司其职,能组合出任意朝向 ——
比如先调俯仰(抬头低头)、再调偏航(左右转头)、最后调滚转(左右倾斜),三个动作独立,覆盖所有姿态。
但当其中一个旋钮转到特定位置(比如偏航旋钮转 90 度),会发现另外两个旋钮的调节效果完全一样(比如“俯仰和滚转”都变成了 “左右倾斜”),相当于其中一个旋钮 “失效” 了
—— 这就是丢失自由度。
04 大多都能转化为李代数空间的优化问题
李群与李代数,是具身智能实现“物理世界适配”与“自主学习”的核心数学工具,它们与四元数协同工作,共同支撑着智能体在三维空间中的稳定运行。
从本质上来说:
-
李群(SO(3)、SE(3))通过前面提到的等核心公式,定义了智能体运动的“物理规则”,确保动作符合真实世界的刚体运动规律;
-
李代数(so(3)、se(3))通过指数映射、对数映射等公式,提供了“线性化计算工具”,让智能体能够通过深度学习优化动作策略;
-
四元数则通过单位化约束和与SO(3)的转化公式,作为“便捷存储格式”,解决了姿态存储和简单旋转计算的需求。
三者一起构成了具身智能姿态表示与运动控制的核心体系。
在具身智能的关键应用场景:
自动驾驶中,李群与李代数的价值尤为突出:它们解决了姿态表示的万向锁问题,通过李代数的线性化特性实现了轨迹优化的可微性,依靠李群的约束规则保证了行驶动作的物理一致性,让自动驾驶汽车能够在复杂路况中精准定位、顺畅避让;
在人形机器人、智能物流等场景中,它们同样发挥着不可替代的作用,让智能体能够灵活调整姿态、优化动作,真正实现“嵌入物理世界、自主完成任务”。
今天你能听到的很多具身智能技术,在其设计深处,都或多或少将流形上的约束问题转化为李代数空间的优化问题:
-
SLAM:后端优化的位姿增量定义在 se(3) 切空间,通过指数映射保证位姿始终在流形上
-
运动规划:在 so(3) 参数空间采样控制点,经指数映射生成平滑无奇异的姿态轨迹
-
全身控制:任务空间速度天然是 se(3) 的元素,通过雅可比矩阵与关节空间建立线性映射
-
模型预测控制:在 se(3) 切空间上做系统线性化,将有限时域优化转化为标准 QP 问题
-
大模型动作微调:将动作增量定义在 se(3) 上做梯度下降,确保网络输出的每一步修正都合法且几何正确
这不是巧合。
这是由具身智能的本质「在物理世界中生成和控制刚体运动」所决定的。
无论是高阶自动驾驶的量产落地,还是人形机器人的自主操作,都离不开这两大数学工具的支撑。
只有让智能体既“符合物理”(遵循李群规则),又“会学习”(借助李代数优化),才能真正实现从“虚拟智能”到“行动智能”的跨越。
感谢阅读,《具身智能基础》栏目,下一篇,你期望是什么内容?

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐


 3
3 0
0- 0



 已为社区贡献52条内容
已为社区贡献52条内容

所有评论(0)