登录社区云,与社区用户共同成长
邀请您加入社区
暂无图片
为遵守国家网络实名制规定,未绑定将限制内容发布与互动
后台私信获取报名链接。
摘要:NLP(自然语言处理)涵盖从底层文本处理到高层语义分析的多层级任务,广泛应用于智能客服、机器翻译、舆情监控等领域。其技术历经规则系统、统计学习到深度学习的演变,当前以大语言模型(LLM)为核心,如GPT-4,展现出多模态和推理能力。然而,NLP仍面临常识缺失、数据偏见、高算力消耗等挑战。学习路径建议从Python编程、机器学习基础入手,逐步掌握Transformer等工具。未来,NLP将向高
计算机视觉(CV)是让计算机理解图像和视频的学科,核心任务包括图像分类、目标检测、语义分割、实例分割和关键点检测。技术发展经历了传统手工特征、深度学习(CNN)和Transformer大模型三个阶段,经典架构如ResNet、UNet和ViT推动了性能突破。CV已广泛应用于人脸识别、OCR、工业质检和医疗诊断,但自动驾驶、视频理解等场景仍面临挑战。未来趋势包括多模态大模型、3D视觉、边缘计算和具身智
如果说2025年AI人才争夺主要集中在大模型算法岗上,那么2026年春招已呈现具身智能、智能硬件、自动驾驶、Agent应用等多个前沿赛道同步爆发的格局,构成AI人才需求的立体化矩阵。但有一点越来越清晰:在“人+AI”协作的时代,真正的竞争力不在于你会不会用某个工具,而在于你是否具备机器难以替代的判断力、创造力和协作能力。风口会转移,热点会降温,但能力永远不过期。如果你已经考虑好,或者正在准备转型A
2022年末ChatGPT问世,标志人类正式迈入生成式大模型革命。短短四年间,多模态大模型、自主AI智能体、具身智能、行业垂直模型完成从实验室到全民普及的跨越式落地,算力、数据、算法三重底层技术实现指数级突破,麦肯锡测算生成式AI将为全球创造7万亿美元经济增量,中国市场独享约2万亿美元价值空间。这不是一次局部技术升级,而是继蒸汽机、电力、互联网之后的第四次工业革命核心引擎,它颠覆生产流程、重塑就业
人形机器人怎么动?表面看,是它抬起手、迈出腿、转过身。往深处看,是关节电机输出力量,减速器转换扭矩,驱动器控制电流,总线传递数据,控制系统协调全身。以上海半醒科技 BXI Robotics 的 ELF3 为例,我们可以更直观地看到:人形机器人不是单一技术的产物,而是一套身体系统。AI 让机器人知道“要做什么”,但关节、电机和控制系统决定它“能不能做出来”。所以,看懂人形机器人,不妨先从它怎么动开始
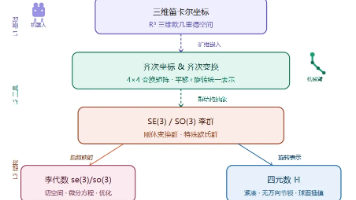
已知相机在世界空间的位姿(外参 4×4 矩阵),同时已知某个三维物体点距离相机的三维位置与深度,通过齐次矩阵乘法,算出这个点在整个场景统一世界坐标系下的坐标。齐次坐标与齐次变换不是纯理论公式,而是贯穿具身智能感知、定位、规划、控制、模型优化全链路的基础工具,所有三维刚体智能体的运行逻辑均基于此搭建。SLAM中把SE(3)齐次矩阵映射为李代数做梯度优化,优化后再还原为齐次矩阵更新位姿。为了解决「旋转
该方案变现路径多元清晰,既能做公益法律援助科普,也可商业化运营维权配套服务,低成本推进普惠型法律服务下沉落地,社会实用价值突出。全球领先的具身智能3D数字人开放平台 - 魔珐星云。
端午快乐。端午前一周 6-15~6-17 三天,中国具身智能完成了"系统性反超"的完整三步曲——大脑反超 + 身体突破 + 资本生态成熟。今天这篇端午特辑,我把三天三步曲打包成一份"系统性反超"完整图谱,帮你用一篇文章吃透中国具身智能 2026 H1 的"分水岭"。
本次测评从内容量产效率、落地投入成本、受众传播效果三个维度,横向对比真人出镜、图文科普、魔珐星云数字人普法三种模式,实测数字人在宠物伤人、邻里宠物扰民纠纷领域落地实力。在落地成本上,魔珐星云依托现成形象、动作、音色资源,省去演员、律师、后期团队开销,零代码配置知识库即可上线项目;同时产品全终端适配,手机短视频、社区普法大屏、宠物门店一体机均可部署落地。想要拓展异宠饲养、寄养纠纷普法内容,依托自定义