
[具身智能-393]:《机器人智能控制系统总体架构》全文内容
这份标准是中国机器人领域,编号为。它已于2026年2月27日发布,并将于起正式实施。这项标准由熊蓉教授领衔,联合华为、海康机器人等41家顶尖单位制定。它的核心目的是解决机器人行业长期存在的“碎片化”和“专机专用”痛点,通过统一架构,让机器人实现“软硬解耦”和“一脑多用”。
·
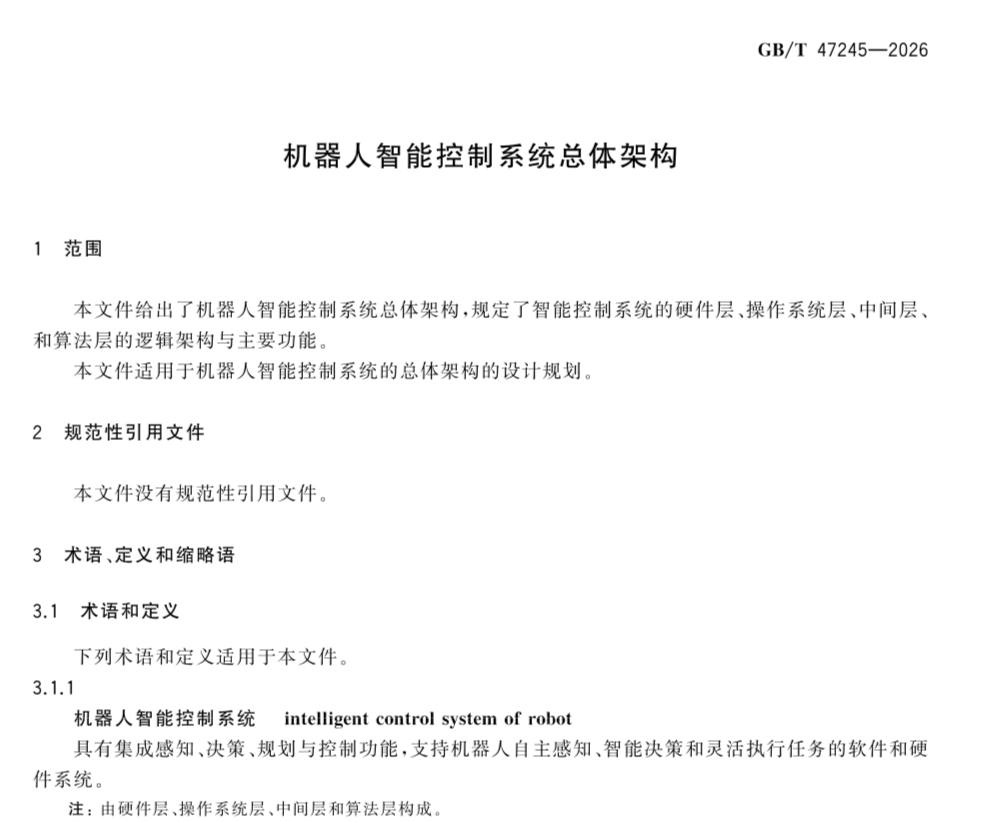
这份标准是中国机器人领域首个通用智能控制系统国家标准,编号为 GB/T 47245-2026。它已于2026年2月27日发布,并将于2026年9月1日起正式实施。
这项标准由浙江大学熊蓉教授领衔,联合华为、海康机器人等41家顶尖单位制定。它的核心目的是解决机器人行业长期存在的“碎片化”和“专机专用”痛点,通过统一架构,让机器人实现“软硬解耦”和“一脑多用”。
以下是对该标准核心内容的详细解读:
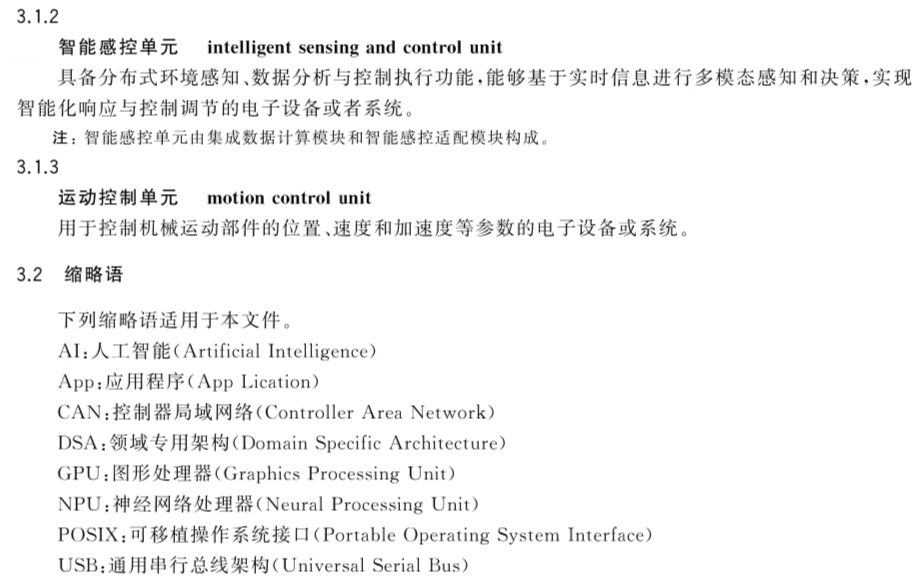
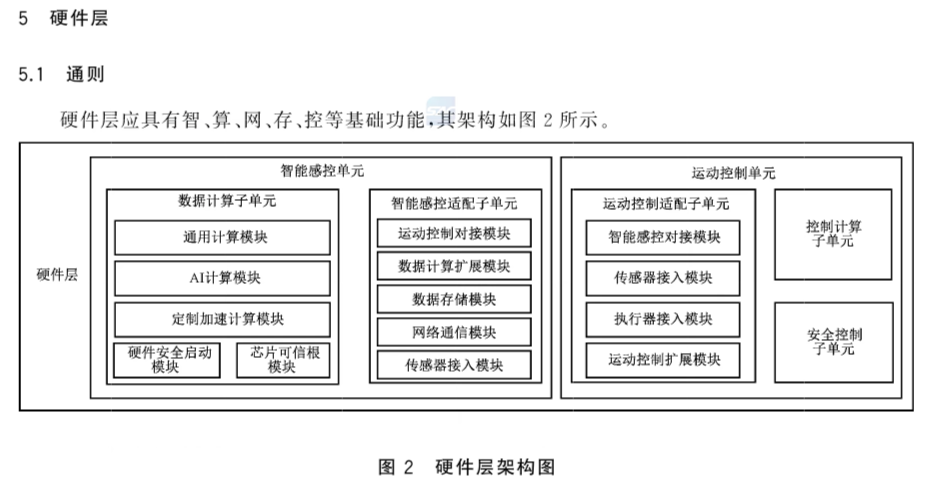
🧠 核心架构:“智、算、网、存、控”一体化
该标准最核心的创新在于提出了一套通用的“智、算、网、存、控”一体化架构。你可以将其理解为给机器人设计了一块通用的“超级主板”,打破了以往硬件与软件强绑定的局面。
表格
| 核心要素 | 功能描述 | 形象比喻 |
|---|---|---|
| 智 (智能认知) | 负责感知环境、理解指令、自主决策与规划。 | 大脑皮层:负责思考与判断。 |
| 算 (算力调度) | 统一管理并分配计算资源,平衡AI推理与实时控制的需求。 | 能量分配中心:确保关键时刻算力够用。 |
| 网 (网络互通) | 统一通信接口与协议,实现不同厂家硬件的无缝连接。 | 神经系统:传递信号,讲统一的“普通话”。 |
| 存 (数据存储) | 统一的数据管理机制,支持海量训练数据、地图与日志存储。 | 海马体:负责记忆与经验沉淀。 |
| 控 (运动控制) | 负责底层的精准执行、伺服驱动与姿态平衡。 | 小脑与脊髓:负责动作的精准执行。 |
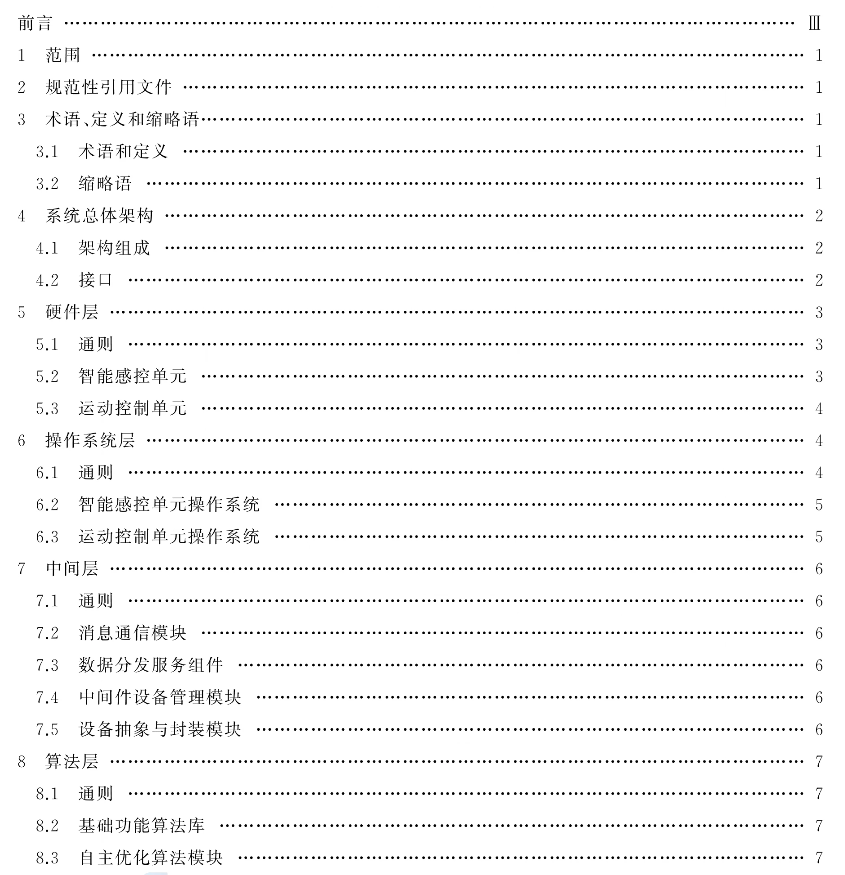
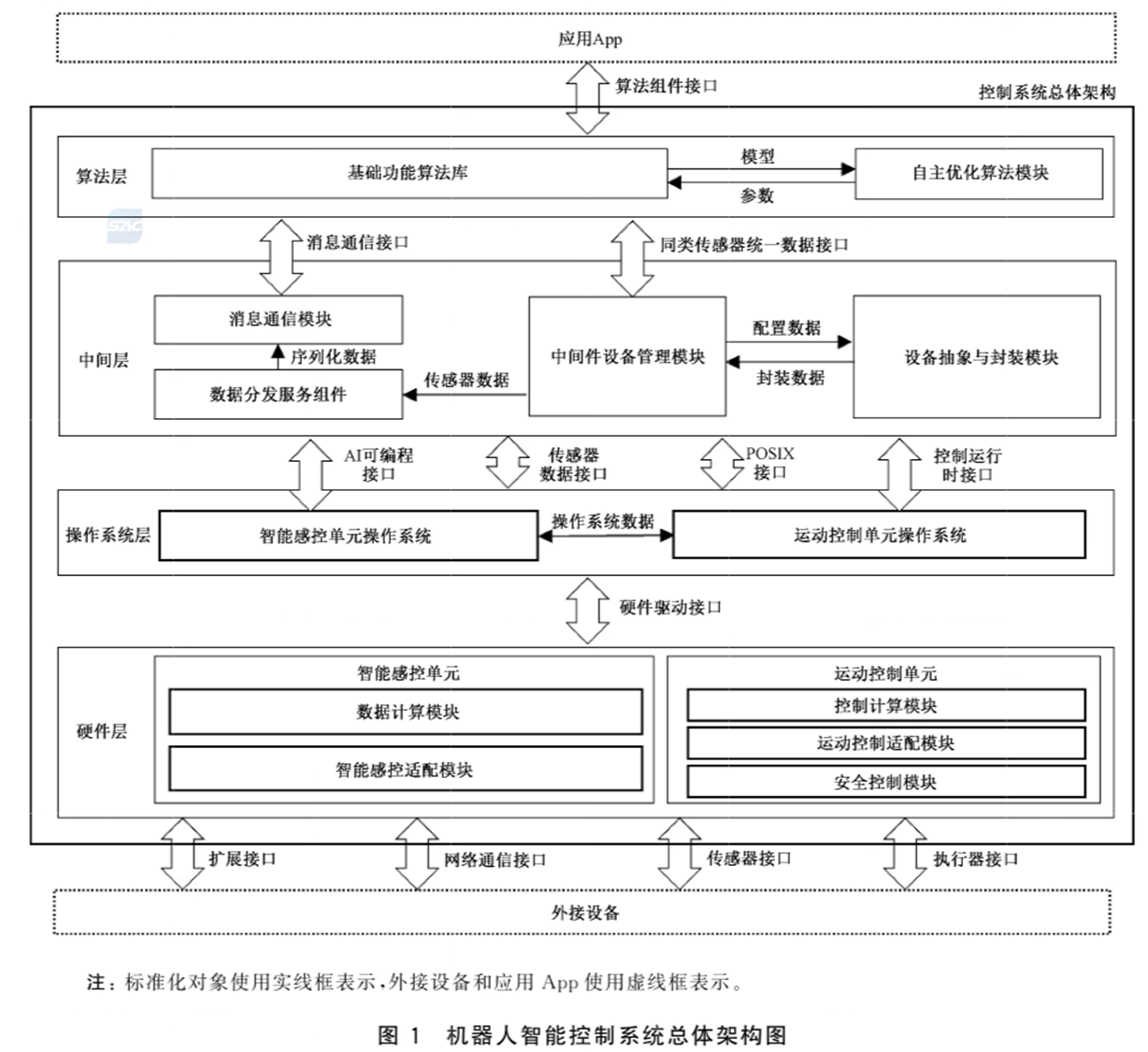
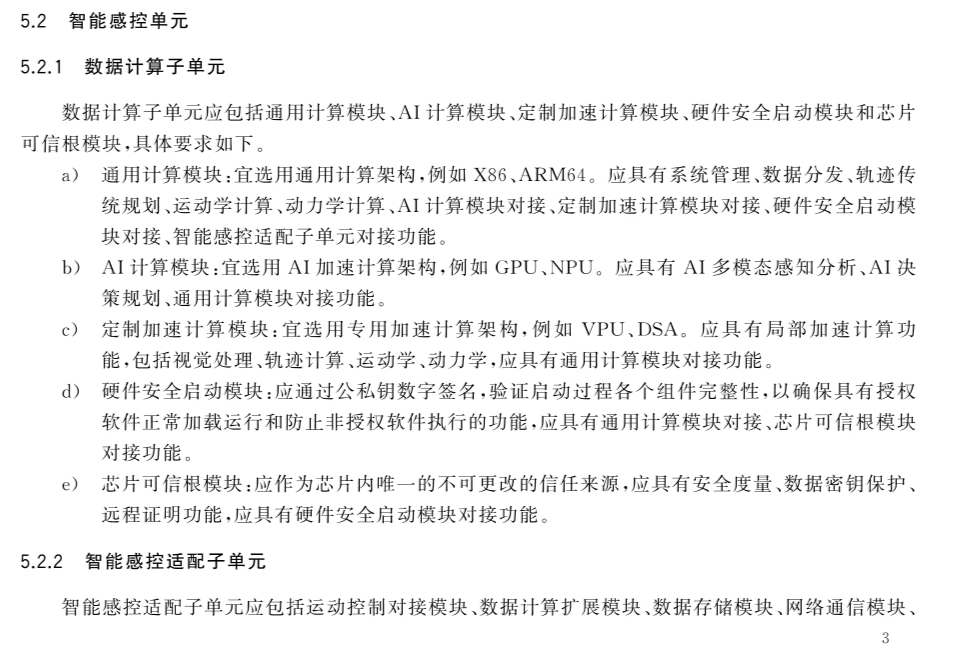
🛠️ 技术逻辑架构:五层设计
为了实现上述核心要素,标准将机器人智能控制系统划分为五个逻辑层次,实现了从底层硬件到上层应用的全面标准化:
- 硬件层 (Hardware Layer)
- 定义:统一硬件接口标准,支持异构硬件接入。
- 作用:让不同品牌的电机、传感器、雷达等“四肢”能够即插即用,不再受限于特定品牌。
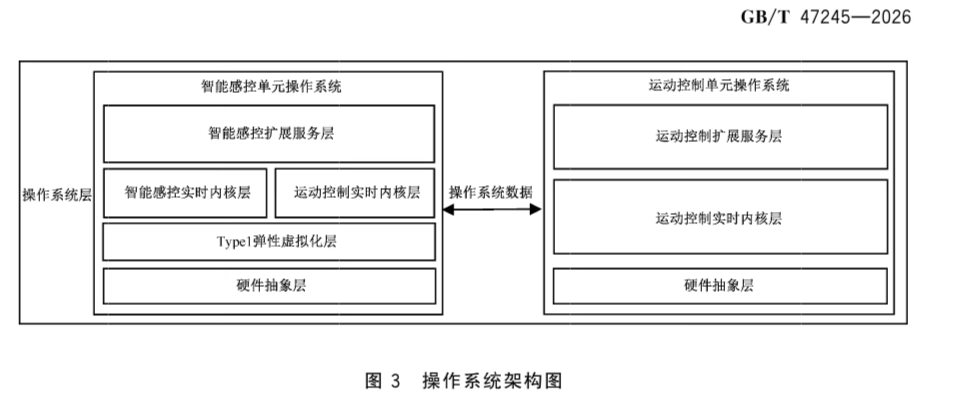
- 操作系统层 (OS Layer)
- 定义:对硬件资源进行抽象和封装。
- 作用:通常基于 ROS 2 或实时Linux系统,提供统一的系统调用接口,屏蔽底层硬件差异。
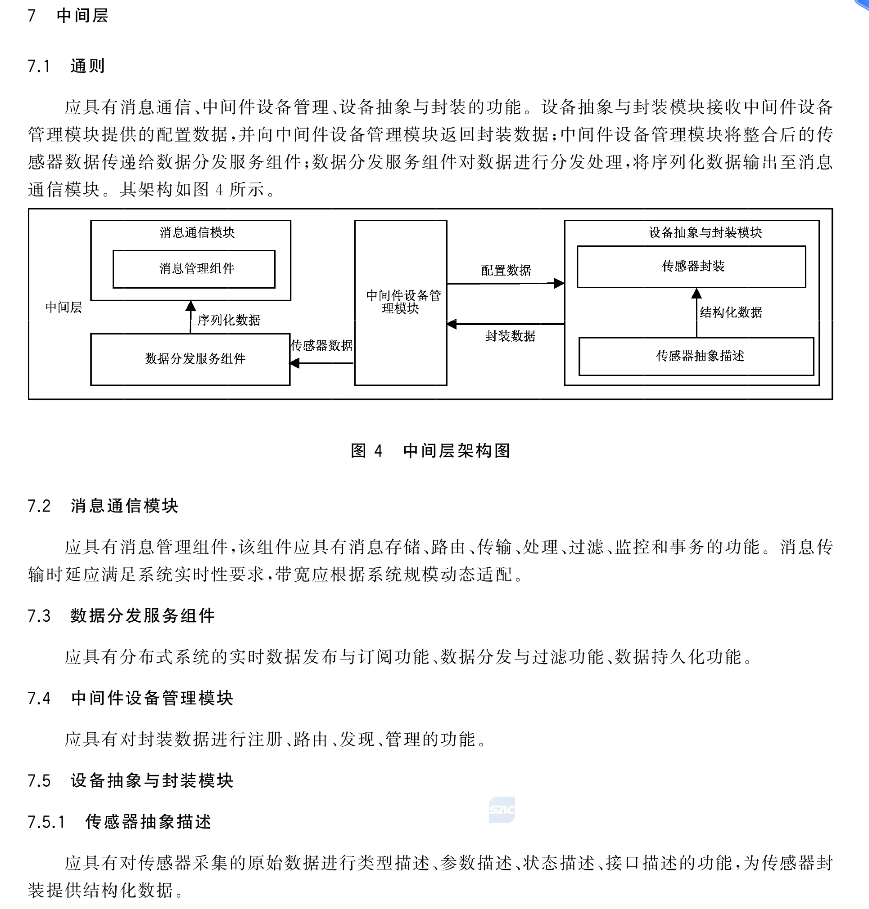
- 中间层 (Middleware Layer)
- 定义:提供通用的算法库、通信机制和运行时环境。
- 作用:作为“胶水”连接底层驱动和上层应用,负责数据分发和服务发现。
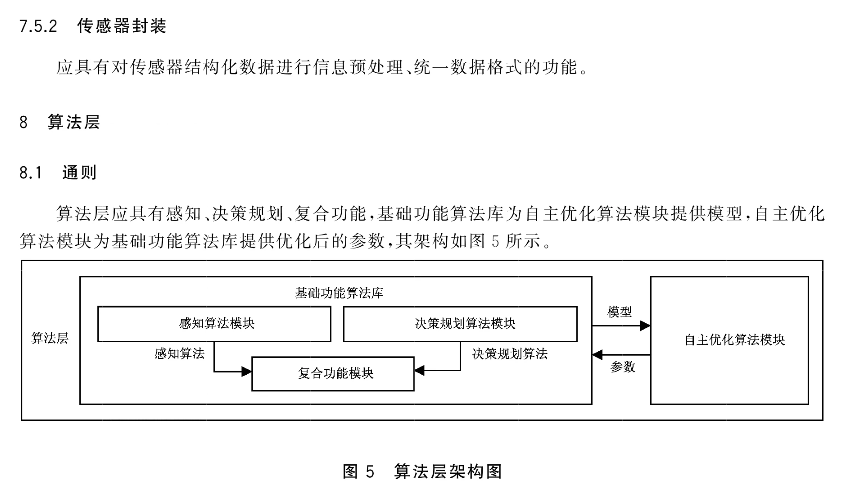
- 算法层 (Algorithm Layer)
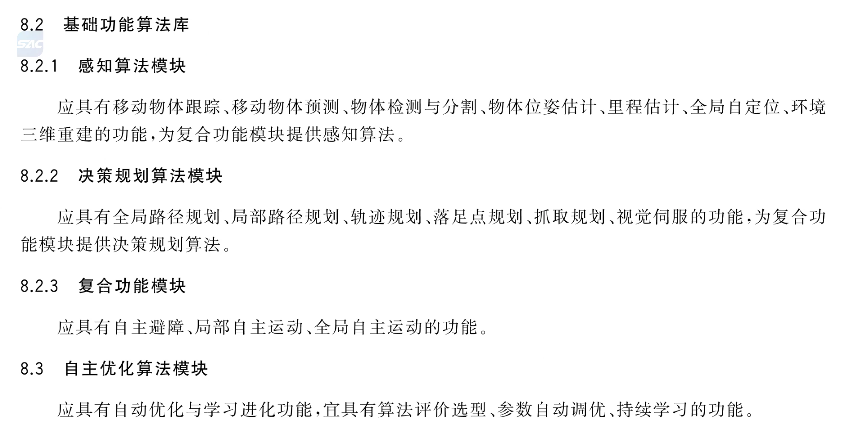
- 定义:包含感知、规划、决策等AI算法模块。
- 作用:支持像“搭积木”一样灵活调用视觉、导航、抓取等算法,支持AI大模型的接入。
- 应用层 (Application Layer)
- 定义:面向具体场景的功能模块。
- 作用:如焊接、搬运、陪伴等具体业务逻辑,开发者只需关注这一层的开发。
🚀 解决什么痛点?
表格
| 痛点 | 现状 | 新国标实施后的改变 |
|---|---|---|
| 专机专用 | 机械臂、AGV、人形机器人系统互不兼容,硬件无法复用。 | 一脑多用:同一套控制系统,通过软件升级即可适配不同形态的机器人。 |
| 研发重复 | 开发新机器人需从零写底层代码,成本高、周期长。 | 积木式开发:底层通用,开发者只需关注上层应用,大幅降低门槛。 |
| 生态封闭 | 硬件厂商与算法厂商绑定,难以形成开放产业链。 | 软硬解耦:硬件造“身体”,软件造“大脑”,通过标准接口对接。 |
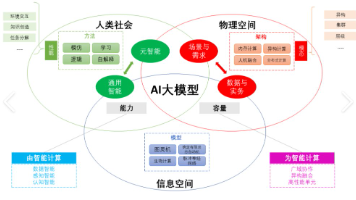
🌟 战略意义:赋能具身智能
- AI 预留插槽:标准为AI大模型接入机器人预留了充足的“插槽”,使得机器人不仅能执行死板指令,还能具备感知分析、自主决策的能力。
- 通用语言:它定义了机器人行业的“普通话”,让不同厂家、不同类型的机器人能够互联互通,甚至协同工作(如机械臂与人形机器人配合)。
- 从制造到定义:标志着中国在机器人核心技术领域从“跟随”转向了“规则引领”,掌握了底层架构的定义权。
📅 实施时间线
- 立项时间:2024年6月
- 发布时间:2026年2月27日
- 正式实施:2026年9月1日(即将到来)

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐

 0
0 0
0- 0



 已为社区贡献200条内容
已为社区贡献200条内容

所有评论(0)