
具身智能中的传感器技术45——麦克风阵列0
麦克风阵列是具身智能机器人的核心听觉系统,通过多个麦克风的协同工作实现声学感知。其核心功能包括声源定位、波束成形和回声消除三大技术,使机器人能够在复杂环境中精准识别声音方向、过滤背景噪音并实现自然交互。主流配置采用6麦环形阵列,兼顾性能与成本,要求具备3-5米远场拾音能力。当前产业中,歌尔、瑞声等中国企业主导硬件市场,科大讯飞领跑语音算法领域。作为机器人的"社交器官",麦克风阵
麦克风阵列是具身智能机器人的核心听觉系统,通过多个麦克风的协同工作实现声学感知。其核心功能包括声源定位、波束成形和回声消除三大技术,使机器人能够在复杂环境中精准识别声音方向、过滤背景噪音并实现自然交互。主流配置采用6麦环形阵列,兼顾性能与成本,要求具备3-5米远场拾音能力。当前产业中,歌尔、瑞声等中国企业主导硬件市场,科大讯飞领跑语音算法领域。作为机器人的"社交器官",麦克风阵列技术直接决定了人机交互的自然度和智能性,是实现具身智能不可或缺的关键组件。
麦克风阵列 (Microphone Array) 是具身智能机器人的“顺风耳”。
它不是简单地放一个麦克风录音,而是通过多个麦克风(2个到8个甚至更多)在空间上的规则排列,配合复杂的数字信号处理算法(DSP),让机器人拥有听声辨位、噪声过滤和远场拾音的能力。
一、 核心作用:为什么要用“阵列”?
单个麦克风(全向麦)只能听到“有声音”,但不知道声音是从哪来的,也分不清人声和噪音。阵列解决了三个核心问题:
-
声源定位 (SSL - Sound Source Localization):
- 原理: 就像人有两只耳朵一样。如果声音从左边来,左边的麦克风会先听到,右边的晚一点听到。算法通过计算这个时间差 (TDOA),就能算出声音的角度。
- 具身智能价值: 当你在背后喊“Siri”,机器人能立刻转头面向你。这是交互体验的基础。
-
波束成形 (Beamforming):
- 原理: 把麦克风阵列想象成一个可以聚焦的“声学手电筒”。通过调整每个麦克风信号的相位延迟,可以增强特定方向的声音(比如主人的方向),同时抑制其他方向的声音(比如电视声)。
- 具身智能价值: “鸡尾酒会效应”。即使在嘈杂的商场里,机器人也能听清你在说什么。
-
回声消除 (AEC) 与 降噪 (NS):
- 原理: 机器人自己有电机噪音,还会播放语音。AEC 算法能把机器人自己发出的声音从录音里减去(Barge-in)。
- 具身智能价值: 随时打断。机器人在说话或者跳舞时,你喊它停,它能听见。
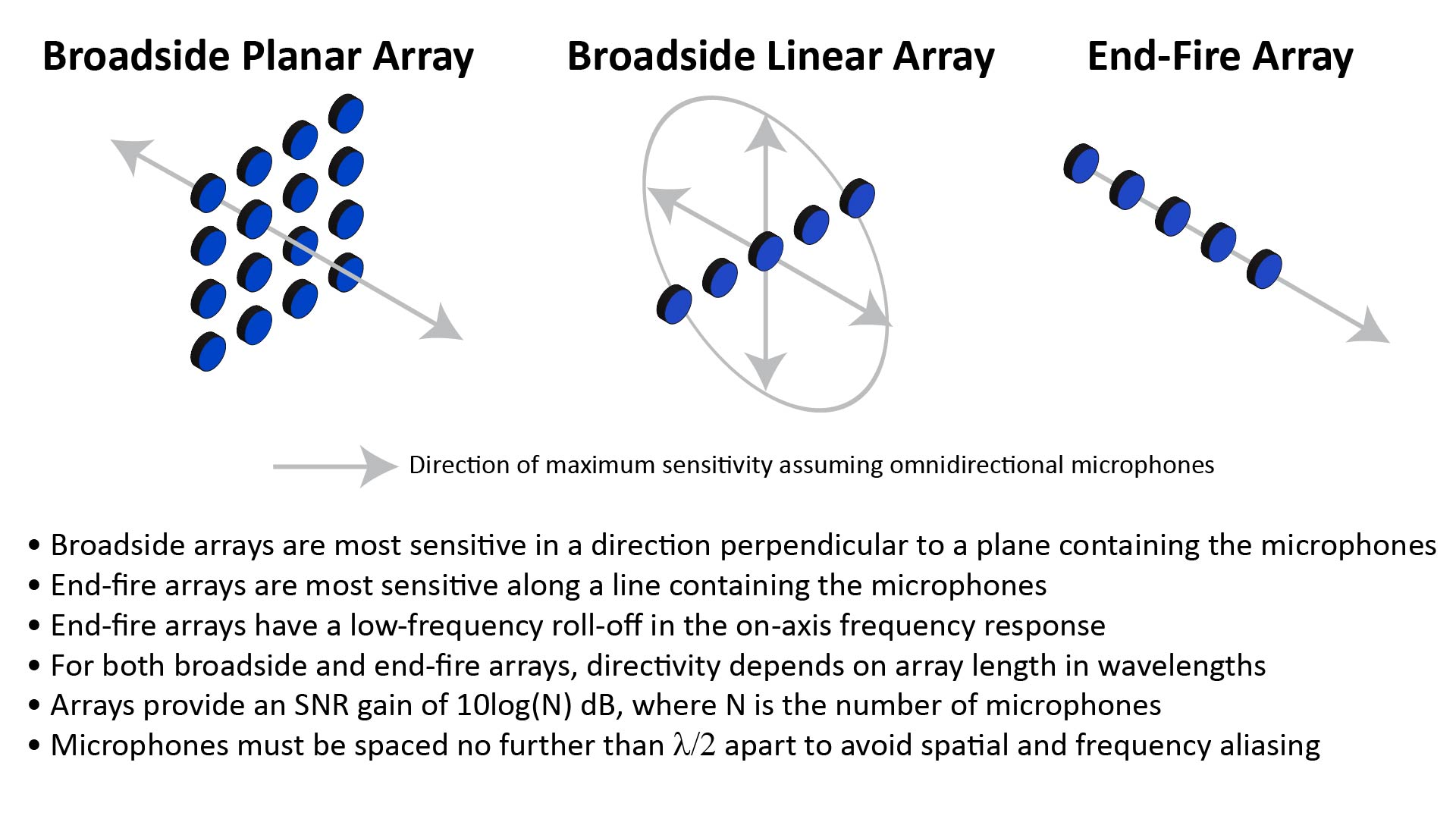
二、 常见阵列构型
| 构型 | 线性阵列 (Linear) | 环形阵列 (Circular) | 分布式阵列 (Distributed) |
|---|---|---|---|
| 形状 | 一字排开 (2-4麦) | 圆形布置 (4-8麦) | 全身分散布置 |
| 安装位置 | 机器人额头、胸口 | 机器人头顶 (最主流) | 全身各处 |
| 定位能力 | 180° 半球<br>(只能分左右,分不清前后) | 360° 全向<br>(前后左右都能分清) | 最强,但算法最难 |
| 适用场景 | 电视机、服务台机器人 | 人形机器人、智能音箱 | 特殊科研用途 |
三、 核心技术指标
- 麦克风数量 (Mic Count):
- 一般来说,麦克风越多,定位越准,降噪效果越好。
- 主流配置: 6 麦环形阵列(兼顾性能与成本)。
- 拾音距离 (Pickup Range):
- 远场 (Far-field): 具身智能通常要求 3-5米 清晰拾音。
- 信噪比 (SNR):
- 麦克风硬件本身的底噪。高性能麦克风 SNR 通常 > 65dB。
- AOP (Acoustic Overload Point):
- 麦克风能承受的最大音量(不破音)。
- 机器人电机就在旁边,噪音很大,需要高 AOP(如 130dB)。
四、 产业现状
- 硬件 (MEMS 麦克风):
- 歌尔股份 (Goertek)、瑞声科技 (AAC): 中国双雄,全球市场份额极高。
- 楼氏电子 (Knowles)、英飞凌 (Infineon): 国际高端霸主。
- 算法 (语音前端处理):
- 科大讯飞 (iFLYTEK): 国内语音交互绝对的王者,提供完整的软硬一体化方案。
- 思必驰 (AISpeech)、云知声: 也是主流的语音算法供应商。
- XMOS / Synaptics: 提供专门的语音 DSP 芯片。
总结: 对于具身智能来说,麦克风阵列不仅仅是“耳朵”,更是**“社交器官”**。一个听不懂人话、不知道谁在说话的机器人,是没有灵魂的。

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐

 14
14 0
0- 0



 已为社区贡献57条内容
已为社区贡献57条内容

所有评论(0)