
[具身智能-600]:机器人仿真软件ISSAC、MuJoco、Three.Js概述以及他们对外通信的方式和接口
特性Isaac SimMuJoCoThree.js核心定位高保真物理仿真与传感器模拟平台高性能物理计算引擎 (侧重动力学)浏览器端 3D 可视化渲染库主要通信协议ROS 2gRPC, ROS, UDPWebSocketroslibjs, HTTP通信场景机器人全系统仿真、远程云端控制、传感器数据流强化学习训练、算法验证、高速动力学解算网页端监控、数字孪生展示、轻量级交互接口复杂度高 (功能丰富,依
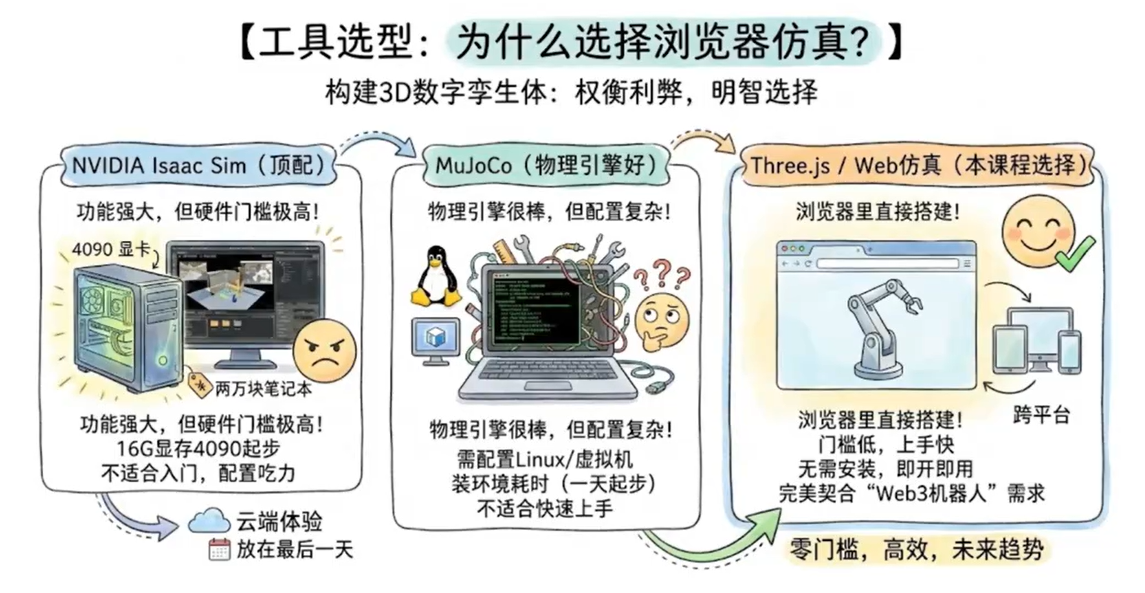
这三个软件/库在机器人开发中扮演着截然不同的角色:Isaac Sim 是高保真的物理仿真平台,MuJoCo 是高性能的物理计算引擎,而 Three.js 则是用于网页端的3D可视化工具。
以下是它们的详细概述以及对外通信方式和接口的对比。
🤖 NVIDIA Isaac Sim
概述:
Isaac Sim 是基于 NVIDIA Omniverse 构建的机器人仿真平台。它不仅仅是一个模拟器,更是一个集成了物理、传感器(如激光雷达、深度相机)、AI 训练和合成数据生成的完整开发环境。它特别强调高保真渲染(基于光线追踪)和精确的物理模拟(基于 PhysX),非常适合用于训练自主移动机器人(AMR)和机械臂,以及进行“仿真到现实”的迁移。
对外通信方式与接口:
Isaac Sim 的通信能力非常强大,旨在连接云端、边缘设备和真实硬件。
-
ROS / ROS 2 桥接 (核心接口)
- 方式:Isaac Sim 内置了标准的 ROS 2 接口,可以通过
ROS2 OmniGraph节点直接在仿真场景中发布和订阅话题。 - 功能:它可以发布传感器数据(图像、点云)、机器人状态(Joint States),并订阅控制指令(Twist、Joint Commands)。
- 特点:实现了与 ROS 生态的无缝集成,支持标准的 URDF 导入。
- 方式:Isaac Sim 内置了标准的 ROS 2 接口,可以通过
-
gRPC (远程过程调用)
- 方式:Isaac Sim 可以作为 gRPC 服务器运行,监听来自外部客户端(如 Windows 笔记本或云端脚本)的连接。
- 功能:通过定义
.proto文件,客户端可以远程调用仿真器内的函数,例如获取机器人状态、发送关节控制指令或重置场景。 - 特点:跨语言(Python/C++)、跨平台,适合远程控制和分布式仿真。
-
ZMQ (ZeroMQ)
- 方式:自 4.5 版本起引入的 ZMQ 桥接模块,提供高速的双向通信。
- 功能:主要用于高吞吐量的数据传输,如摄像头数据流、真值数据交换。
- 特点:低延迟,适合硬件在环(HIL)测试和实时控制算法开发。
-
WebRTC (流媒体传输)
- 方式:通过 WebRTC 协议将 Isaac Sim 的图形界面实时串流到浏览器或轻量级客户端。
- 功能:允许在无显卡的设备上远程查看和操作高保真仿真画面。
- 特点:低延迟视频流,适合远程监控和协作。
⚙️ MuJoCo (Multi-Joint dynamics with Contact)
概述:
MuJoCo 是一个专注于物理计算的引擎,由 Google DeepMind 开发。与 Isaac Sim 这种“大而全”的平台不同,MuJoCo 的核心优势在于其极高精度的接触动力学求解器和计算速度。它特别擅长处理多关节机器人的复杂接触问题(如灵巧手抓取、双足行走),是强化学习(RL)和生物力学研究的首选工具。
对外通信方式与接口:
MuJoCo 本质上是一个库(Library),通常嵌入在代码中运行,因此其通信方式更偏向于编程接口和脚本集成。
-
Native API (C/C++ & Python)
- 方式:直接调用 MuJoCo 的底层 API(如
mj_step进行物理步进,mj_data获取状态)。 - 功能:开发者通过 Python 或 C++ 脚本直接读写模型数据(位置、速度、力矩)。
- 特点:性能最高,无中间件开销,适合算法研发。
- 方式:直接调用 MuJoCo 的底层 API(如
-
ROS / ROS 2 桥接 (
mujoco_ros)- 方式:通过第三方的 ROS 桥接包(如
mujoco_ros),将 MuJoCo 封装为 ROS 节点。 - 功能:加载 MJCF(MuJoCo XML)模型,并通过 ROS Topic 暴露控制接口(发布力矩/位置指令)和传感器反馈。
- 特点:使得 MuJoCo 可以像 Gazebo 一样被 ROS 节点控制,方便算法移植。
- 方式:通过第三方的 ROS 桥接包(如
-
UDP / Socket 通信
- 方式:在自定义的主程序中开启 UDP 服务端线程,监听外部客户端的控制指令。
- 功能:常用于跨机通信,例如从一台电脑发送手柄控制信号,另一台电脑运行 MuJoCo 接收并仿真。
- 特点:轻量级,灵活性高,适合简单的远程驱动演示。
-
ZMQ
- 方式:部分项目(如 SO-ARM100)使用 ZMQ 进行进程间通信,将仿真数据转发给实机控制端。
- 特点:用于虚实结合的场景,实现仿真数据到真实机械臂的透传。
🌐 Three.js (3D Web渲染库)
概述:
Three.js 不是物理仿真引擎,而是一个基于 WebGL 的 JavaScript 3D 渲染库。它运行在浏览器中,负责将 3D STL模型(几何体、材质、光照)绘制在网页上。在机器人领域,它通常作为“数字孪生”的可视化前端,或者配合简单的物理库(如 Cannon.js)进行轻量级展示(本身不是物理世界仿真平台,仅仅是 STL模型渲染库)。
对外通信方式与接口:
由于运行在浏览器环境中,Three.js 的通信主要依赖 Web 标准协议。
-
WebSocket / Socket.IO
- 方式:浏览器通过 WebSocket 与后端服务器(通常是 Python 或 Node.js)建立长连接。
- 功能:实时接收真实的物理机器人的关节角度、位姿数据,并驱动 Three.js 中的 3D 模型更新动画。
- 特点:低延迟,双向通信,是 Web 端控制机器人的主流方案。
-
roslibjs (ROS Bridge)
- 方式:通过
roslibjs库连接rosbridge_server(WebSocket 端点)。 - 功能:直接在网页中订阅 ROS 话题(如
/joint_states)或发送控制指令。 - 特点:让网页浏览器直接成为 ROS 的客户端,无需后端转发,适合开发 Web 版的机器人监控面板。
- 方式:通过
-
HTTP / REST API
- 方式:通过 AJAX/Fetch 请求获取静态数据(如加载 URDF 模型文件、场景配置文件)。
- 功能:初始化场景时加载资源。
📊 总结对比
| 特性 | Isaac Sim | MuJoCo | Three.js |
|---|---|---|---|
| 核心定位 | 高保真物理仿真与传感器模拟平台 | 高性能物理计算引擎 (侧重动力学) | 浏览器端 3D 可视化渲染库 |
| 主要通信协议 | ROS 2, gRPC, ZMQ, WebRTC | Native API (Python/C++), ROS, UDP | WebSocket, roslibjs, HTTP |
| 通信场景 | 机器人全系统仿真、远程云端控制、传感器数据流 | 强化学习训练、算法验证、高速动力学解算 | 网页端监控、数字孪生展示、轻量级交互 |
| 接口复杂度 | 高 (功能丰富,依赖 Omniverse) | 中 (专注于物理状态读写) | 低 (依赖 Web 标准,易于上手) |
| 典型应用 | 自动驾驶、仓储机器人、灵巧手抓取训练 | 双足机器人行走、复杂接触动力学研究 | 机器人状态网页监控、Web端遥操作界面 |
一句话建议:
- 如果你需要逼真的传感器数据(如激光雷达)和工业级仿真,选 Isaac Sim。
- 如果你做强化学习或需要极快的物理运算速度,选 MuJoCo。
- 如果你想在网页上展示机器人状态或做一个轻量级监控界面,选 Three.js。

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐
 9
9 0
0- 0



 已为社区贡献201条内容
已为社区贡献201条内容

所有评论(0)