
[具身智能-716]:ros2_control 全套核心功能包、架构、接口与差速轮实战用法
实时硬件抽象 + 控制器管理框架差速轮专用,自动逆解、PID、里程计优势硬件无关、仿真真机一致、实时稳定、模块化。
·
ros2_control 是 ROS 2 中机器人底层控制的核心框架,专为实时、硬件抽象、模块化控制设计。它彻底解耦了硬件驱动与控制算法,让你在差速轮、机械臂、足式机器人上复用同一套控制逻辑。
以下是 ros2_control 全套核心功能包、架构、接口与差速轮实战用法(基于 Humble/Iron 最新版)。
一、核心仓库与功能包清单
ros2_control 分为两大核心仓库:
1. 主框架仓库:ros2_control
(底层核心、接口、管理器)ros2_control
controller_manager- 核心大脑:管理所有控制器与硬件接口
- 提供
ros2_control_node(实时控制循环节点),使得ros2_control成为ROS2节点网络中的一员。 - 服务:加载 / 启动 / 停止 / 切换具体的控制器,不同的控制器有不同的算法。
hardware_interface- 硬件抽象层(HAL):统一电机 / 执行器接口
- 定义:
StateInterface(状态读取,如位置 / 速度)、CommandInterface(指令下发)ros2_control - 支持:位置 / 速度 / 力控 三大标准接口
controller_interface- 控制器基类:所有控制器必须继承实现
- 生命周期:
on_configure→on_activate→update→on_deactivate
joint_limits- 关节限位、速度 / 加速度 / 力矩软限幅
transmission_interface- 减速器 / 传动机构建模(减速比、效率)
ros2controlcli- 命令行工具:
ros2 control list_controllers、load、start、switch
- 命令行工具:
rqt_controller_manager- GUI 面板:可视化管理控制器
2. 官方控制器仓库:ros2_controllers
(常用控制器库,直接开箱即用)ros2_control
diff_drive_controller—— 差速轮专用(你最需要)- 输入:
cmd_vel(linear.x, angular.z) - 逆运动学解算:自动转左右轮目标转速
- 里程计输出:
odom位姿 + TF
- 输入:
joint_trajectory_controller- 机械臂:轨迹跟踪(点到点、圆弧)
forward_command_controller- 透传控制器:直接下发位置 / 速度 / 力矩指令
position_controller/velocity_controller/effort_controller- 单关节独立闭环控制
imu_sensor_broadcaster/joint_state_broadcaster- 状态广播:发布 IMU、关节状态到 ROS Topic
3. 工具与辅助包
control_toolbox:PID、滤波器、限幅等控制算法库realtime_tools:实时安全的缓冲区、发布器control_msgs:控制专用消息(如JointTrajectory、FollowJointTrajectory)gz_ros2_control:Gazebo 仿真插件(真机 / 仿真无缝切换)ros2_control_demos:官方示例(含差速轮、机械臂完整例程)
二、ros2_control 核心架构(四层)
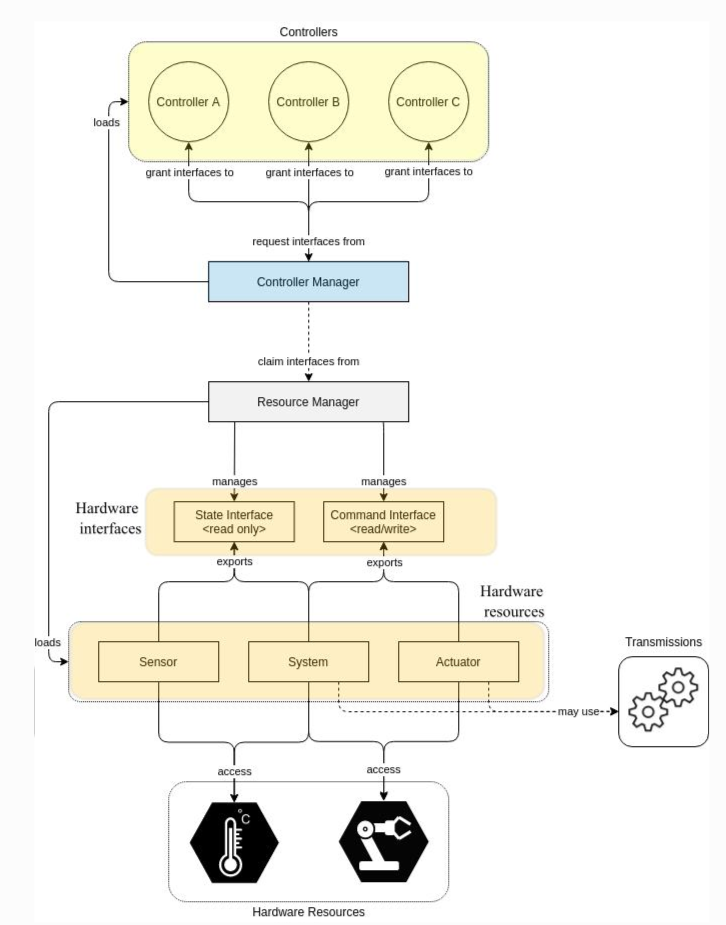
- 硬件层:电机、编码器、IMU、驱动板
- 硬件接口层(
hardware_interface)- 驱动插件:实现
read()/write() - 暴露:
state_interfaces(位置 / 速度)、command_interfaces
- 驱动插件:实现
- 控制器管理器(
controller_manager)- 实时循环:
read() → update() → write() - 资源管理:接口互斥、控制器调度ros2_control
- 实时循环:
- 控制器层(
ros2_controllers)diff_drive_controller、joint_trajectory_controller等- 计算指令 → 下发到硬件接口
三、差速轮控制:diff_drive_controller 详解
1. 核心功能(自动完成)
- 订阅:
cmd_vel(geometry_msgs/Twist) - 逆运动学:\(\omega_L = \frac{v}{r} - \frac{\omega L}{2r}, \quad \omega_R = \frac{v}{r} + \frac{\omega L}{2r}\)
- 轮速 PID 闭环(内置)
- 里程计解算:
odom话题 +odom → base_footprintTF - 支持:正反转、加减速限幅、打滑补偿
2. 典型配置(YAML)
yaml
controller_manager:
ros__parameters:
update_rate: 100 # 100Hz 实时控制
diff_drive_controller:
ros__parameters:
type: diff_drive_controller/DiffDriveController
left_wheel_names: ["left_wheel_joint"]
right_wheel_names: ["right_wheel_joint"]
wheel_separation: 0.30 # 轮距 L (m)
wheel_radius: 0.075 # 轮半径 r (m)
# 限幅
linear:
x:
max_velocity: 1.0
min_velocity: -1.0
max_acceleration: 2.0
angular:
z:
max_velocity: 3.14
max_acceleration: 6.28
# 里程计
publish_rate: 50
odom_frame_id: odom
base_frame_id: base_footprint
3. URDF 硬件接口配置
xml
<ros2_control name="DiffBotSystem" type="system">
<hardware>
<plugin>hardware_interface/MyDiffBotDriver</plugin> <!-- 你的驱动 -->
</hardware>
<joint name="left_wheel_joint">
<command_interface name="velocity"/>
<state_interface name="position"/>
<state_interface name="velocity"/>
</joint>
<joint name="right_wheel_joint">
<command_interface name="velocity"/>
<state_interface name="position"/>
<state_interface name="velocity"/>
</joint>
</ros2_control>
四、控制流程(差速轮实战)
- 启动
bash
运行
ros2 launch my_robot bringup.launch.py # 自动加载:controller_manager、diff_drive_controller、joint_state_broadcaster - 查看状态
bash
运行
ros2 control list_controllers # 输出:diff_drive_controller[active] - 遥控运动
bash
运行
ros2 run teleop_twist_keyboard teleop_twist_keyboard # 发布 cmd_vel → 控制器解算轮速 → 电机转动 - 查看里程计
bash
运行
ros2 topic echo /diff_drive_controller/odom
五、与你之前 “差速轮控制” 的对应关系
你之前问的差速轮控制逻辑:
- 逆运动学 →
diff_drive_controller内置 - 双轮 PID → 控制器自动闭环
- 里程计 → 自动发布
- 上层 cmd_vel → 完全兼容 Navigation2
一句话:ros2_control + diff_drive_controller = 差速轮控制全栈解决方案。
六、安装命令
bash
运行
# Humble
sudo apt install ros-humble-ros2-control ros-humble-ros2-controllers ros-humble-diff-drive-controller ros-humble-ros2-control-demos
总结
ros2_control:实时硬件抽象 + 控制器管理框架diff_drive_controller:差速轮专用,自动逆解、PID、里程计- 优势:硬件无关、仿真真机一致、实时稳定、模块化

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐
 11
11 0
0- 0



 已为社区贡献201条内容
已为社区贡献201条内容

所有评论(0)