
远程微米级装配实测:Haply力反馈控制器集成工业遥操作方案
力反馈临场遥操作方案突破远程精密装配难题,集成Haply力控器、UR机械臂、BOTA力矩传感器等设备,构建力觉-视觉融合闭环系统。该系统实现毫秒级力反馈与微米级定位,使操作者远程感知装配阻力,完成精密部件对位与插入。具备三大优势:1)触觉增强提升作业精度;2)模块化设计支持快速部署;3)适应高危环境作业。典型应用于半导体装配、核电检修及医疗机器人研发,推动工业操作从"替代人手"
隔空精密装配新标杆|力反馈临场遥操作,打破空间作业壁垒
在精密制造与特种运维领域,如何远程完成高精度作业是核心挑战。
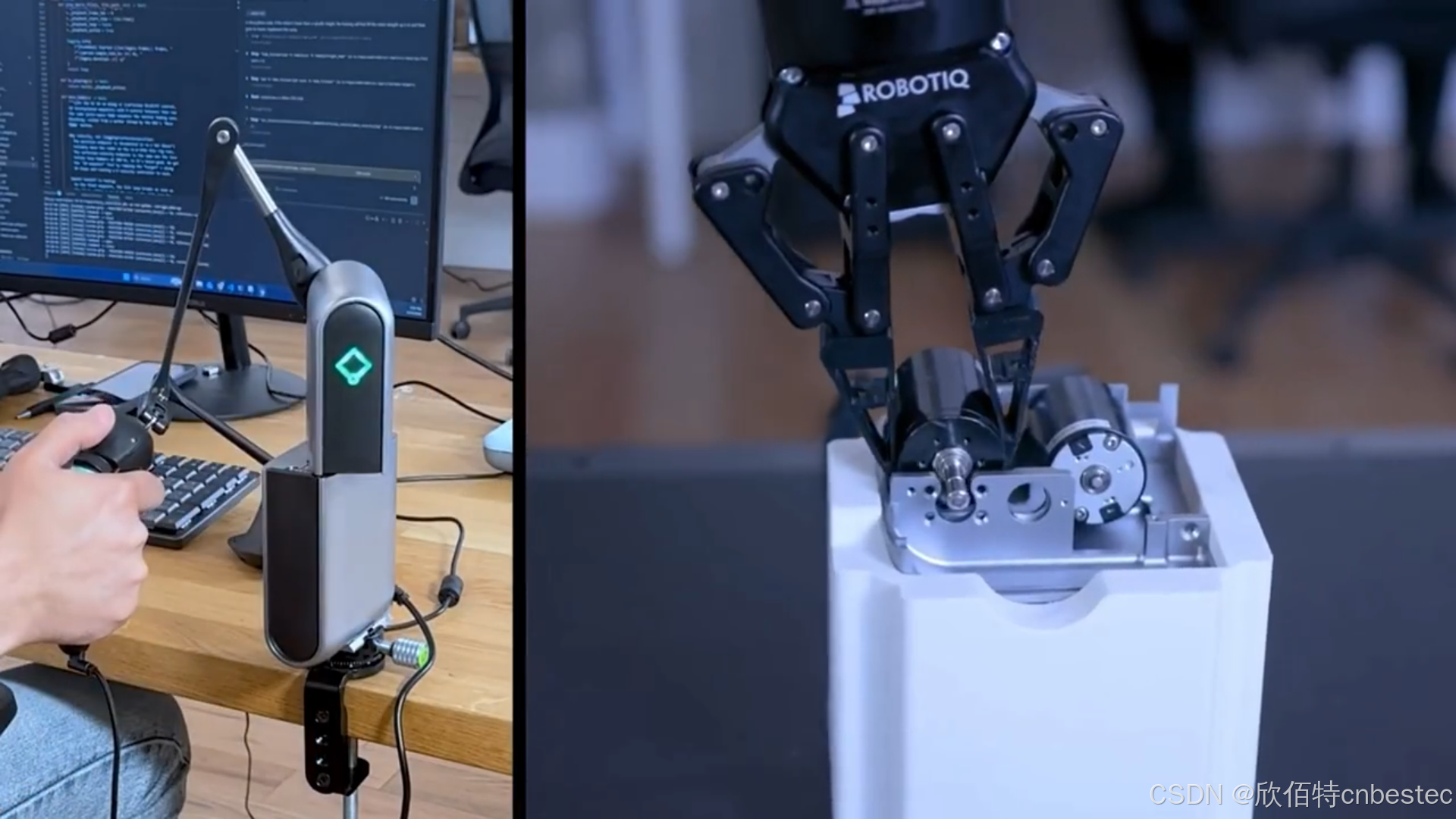
一套集成Haply Inverse 3力反馈控制器、UR协作机器人、BOTA力矩传感器、Robotiq 2F-85夹爪及工业相机的解决方案,为“力觉临场”遥操作提供了实践路径。
该方案构建了实时的力觉交互闭环。操作者通过Haply远程操控UR机械臂,末端的BOTA传感器实时采集作业过程中的力/力矩数据,并同步反馈,使操作者能清晰感知远程的装配阻力与夹持力度,结合视觉定位,远程完成微米级精密零部件对位、插入等复杂装配任务,实现“所见即所触”。
方案核心价值体现为:
1. 触觉维度突破:将遥操作从单一视觉扩展到力触觉融合,凭借毫秒级力反馈实现精密对位与过盈配合,有望提升作业精度与可靠性。
2. 模块化快速集成:核心硬件均支持ROS/ROS2等标准框架,便于二次开发,有助于缩短部署周期。
3. 适应复杂场景:结合协作机器人本体的力感知与柔性夹爪,既能满足精密装配要求,也为高危、防爆等特殊环境提供了远程操作可能。
其应用场景广泛,主要包括:
• 精密制造:如半导体芯片微装配、精密光学器件贴合。
• 特种运维:适用于核电、化工等高风险环境的设备检修与更换。
• 科研与医疗:可作为手术机器人算法验证平台、医疗器械无菌装配支撑,也是具身智能研究的优选平台。
该技术的演进,正推动机器人从“替代人手”向“延伸人手感知”发展,为探索“人类在环”的工业智能制造新模式提供了关键技术支撑。
欢迎关注 “欣佰特科技” ,持续为大家带来 “具身智能领域”前沿技术及应用!详情可邮件咨询sales@cnbestec.com

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐


 6
6 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)