
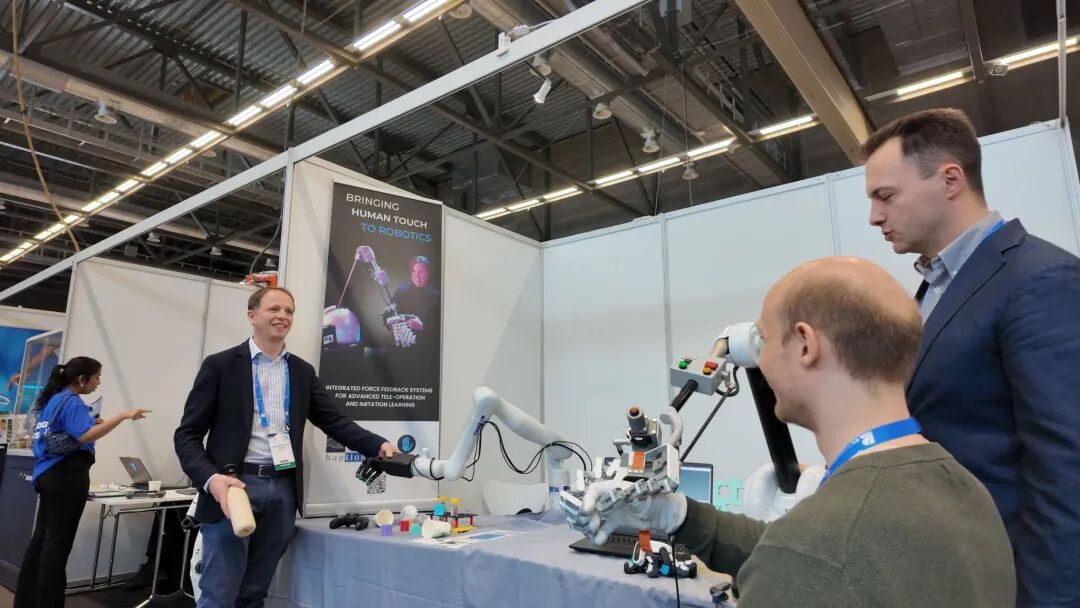
搜维尔科技:Haption力反馈与SenseGlove R1触觉手套适配,并结合机械臂Tesollo机械手,完整遥操作方案
集成XELA的uSkin传感器后,每个指尖覆盖12个传感点,可检测低至0.1g的接触力,让机械手获得类人触觉感知,实现更精准的物体交互,这套集成方案在2025年第四季度完成交付,2026年第一季度末开始接受商用订单。提供Franka Control Interface (FCI) 作为标准控制接口,支持1kHz实时控制频率,可通过以太网实现底层双向通信,兼容ROS等科研生态,能精准接收关节扭矩
Haption Virtuose力反馈设备
提供6自由度全局力反馈,精度覆盖0.01–10N,延迟仅5ms,主要负责控制Franka机械臂的整体大运动,同时向操作者反馈机械臂受力信息(重量、碰撞、刚性接触)

SenseGlove R1触觉手套
支持40自由度手指追踪,四指主动力反馈+指尖振动触觉,可捕捉手指姿态与抓握力度,用于操控Tesollo DG 5F灵巧手的精细动作,并接收机械手的接触纹理、力信息反馈。
Tesollo DG 5F机械手+ 触觉传感器
DG 5F本身是20自由度人形五指机械手,具备7kg抓握力;集成XELA的uSkin传感器后,每个指尖覆盖12个传感点,可检测低至0.1g的接触力,让机械手获得类人触觉感知,实现更精准的物体交互,这套集成方案在2025年第四季度完成交付,2026年第一季度末开始接受商用订单。

机械臂
提供Franka Control Interface (FCI) 作为标准控制接口,支持1kHz实时控制频率,可通过以太网实现底层双向通信,兼容ROS等科研生态,能精准接收关节扭矩、笛卡尔位姿等控制指令,同时反馈机械臂实时状态,是这套遥操作/具身智能方案的常用执行载体。

整体闭环控制架构
这套系统是面向机器人遥操作、具身智能训练的人机闭环方案,核心流程为:
人→机器人
操作者通过SenseGlove R1输出手指姿态、抓握力指令,通过Haption Virtuose输出机械臂位置、姿态指令,两者分别传递给Tesollo灵巧手和Franka机械臂
机器人→人
机械手的接触力、纹理信息通过SenseGlove R1以振动+阻力形式反馈给人手,Franka机械臂的受力、惯性信息通过Haption Virtuose以力反馈形式传递给操作者手臂
AI训练扩展
整套系统可同步记录轨迹、姿态、力扭矩、触觉的多模态数据,用于训练机器人模仿学习/强化学习策略,实现机器人自主执行+人类远程纠错的混合开发模式。
关于搜维尔科技
我们热衷于遥操作技术的研发与推广。我们热衷于推动技术发展,使其处于技术前沿甚至更前沿。在这个频道上,我们想分享我们基于遥操作技术的最新体验。搜维尔科技与Haption和Senseglove和Tesollo总部均有签署代理合作协议,成为其在中国大陆地区的授权代理经销商。搜维尔科技现支持相关产品购买、咨询与售后支持等服务,欢迎垂询。

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐


 7
7 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)