
抗磁、抗窄、抗微动!Captiks全身惯性动捕系统 攻克车内精细动作捕捉难题
Captiks最新视频,展示其MovitSystem惯性动捕系统在特斯拉电动车内的实测表现。该系统通过16个无线传感器和抗干扰算法,在狭窄空间和复杂电磁环境下精准捕捉驾驶员细微动作,包括手腕微调等操作。测试验证了该系统在真实场景中稳定采集40+关节参数的能力,为人形机器人开发、智能座舱研究及具身智能领域提供了高质量运动数据采集方案。该技术克服了传统光学动捕的局限,展现出在复杂环境中的实用价值。
近日,意大利动作捕捉技术公司 Captiks 发布了一段演示视频,展示了其 Movit System 惯性动捕系统在真实特斯拉电动汽车内进行全身动作捕捉的能力。该实测旨在验证系统在“窄空间、强干扰、微动作”等挑战性环境下的实际表现。
Captiks动捕系统实测——精准复刻电车驾驶员细微操控
应对挑战:窄空间与复杂电磁环境
新能源汽车座舱是一个具有代表性的复杂场景:
· 空间局促:人体动作幅度受限,操作集中于手腕微调、指尖触控等精细行为。
· 电磁环境复杂:密集的电子元器件、高压电池与电机系统产生较强的电磁场,可能对传感器造成干扰。
传统光学动捕方案因依赖视线、布线复杂且惧怕遮挡,在此类场景中应用受限。
实测表现:稳定捕捉细微动作
在演示中,测试人员穿戴 16个 Movit G1 无线惯性传感器(单个重量25g,采样率200Hz),从室外进入车内,完成了开门、坐姿调整、握持方向盘等自然驾驶动作。
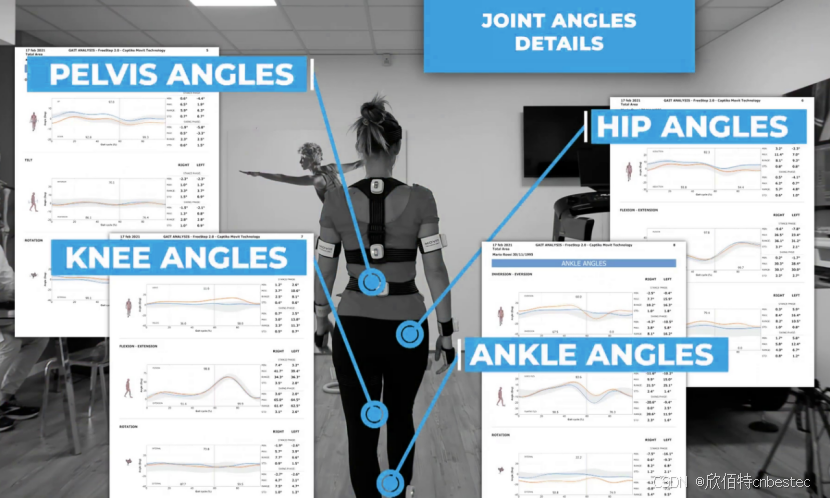
Captiks动捕系统通过自研的抗磁干扰算法和多传感器融合技术,在演示过程中有效应对了车内电磁环境的影响,同步采集40+ 关节参数实时曲线。在长时间静坐仅有微小手部动作的状态下,重建的3D虚拟骨骼保持了较好的稳定性,同步了演示中的细微姿态变化。
应用前景:支持多领域研究与开发
Captiks此次成功的车内实测,为多个领域的应用提供了新的可能性:
· 人形机器人开发:可采集真人驾驶、操作等精细动作数据,用于训练机器人的模仿学习(Imitation Learning)和VLA(视觉-语言-动作)模型。
· 智能座舱与人机工学研究:有望为量化评估驾驶员状态、交互舒适度,以及座舱设计提供生物力学数据支持。
· 具身智能研究:此类在真实场景中采集的运动数据,可作为相关AI模型训练的数据来源。
Captiks Movit System 凭借抗干扰、适配窄空间、微动高精度三大特性,为具身智能行业补齐了复杂实景下的高质量人体运动数据采集方案。
欢迎关注 “欣佰特科技” ,持续为大家带来 “具身智能领域”前沿技术及应用!详情可邮件咨询sales@cnbestec.com

电影级数字人,免显卡端渲染SDK,十行代码即可调用,工业级demo免费开源下载!
更多推荐
 5
5 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)